Artikelaktionen
GRAPP 2006
System Architecture of a Mixed Reality Framework
extended and revised for JVRB
urn:nbn:de:0009-6-7774
Keywords: Mixed Reality framework, Augmented Reality, data-flow management, distributed systems
Subjects: Augmented Reality
Abstract
In this paper the software architecture of a framework which simplifies the development of applications in the area of Virtual and Augmented Reality is presented. It is based on VRML/X3D to enable rendering of audio-visual information. We extended our VRML rendering system by a device management system that is based on the concept of a data-flow graph. The aim of the system is to create Mixed Reality (MR) applications simply by plugging together small prefabricated software components, instead of compiling monolithic C++ applications. The flexibility and the advantages of the presented framework are explained on the basis of an exemplary implementation of a classic Augmented Realityapplication and its extension to a collaborative remote expert scenario.
Creating Mixed Reality (MR) applications currently is one of the most challenging tasks in the field of computer graphics. The developer has to deal with exotic hardware devices like head mounted displays (HMDs), GPS receivers, electronic compasses etc. In many cases, especially when building mobile systems using HMDs, traditional IO devices like keyboards and mice are not available. No widely adopted standards exist in this area.
Our own experience with different projects has shown that most MR applications are closely tied to the hardware they have been developed for. It is usually not a trivial task to switch from a video-see-trough head mounted display to a system based on a web pad, or to exchange an electromagnetic tracking system by a video-based tracking system. In most cases, changing the system configuration results in rewriting major parts of the MR application.
Another problem is that hardware platforms for MR applications are becoming more and more heterogeneous. Mobile AR applications for example are not necessarily limited to the usual Wintel platform (MS Windows operating system on an Intel microprocessor), instead, new hardware platforms like handheld PCs, handheld game consoles and mobile phones are emerging. The broad range of different hardware configurations and operating systems on these kinds of devices makes cross-platform development even worse.
Obviously, this situation is not very satisfactory and hinders the introduction of commercial MR applications. For this reason, we developed a framework that allows us to separate the hardware-independent application logic from the parts of the software that depend on the hardware configuration. Our framework allows to develop MR applications by using VRML and a special markup language used to describe the hardware configuration. Applications written in these markup languages are completely platform independent, i.e. they can be executed on any platform the runtime system has been ported to. Changing the hardware configuration can be simply done by modifying text files without the need to recompile any application code. The main focus of our system is rapid prototyping, i.e. it is meant to be a research system that allows to rapidly develop small applications that serve as a test bed for new algorithms.
The main research focus in the area of Augmented Reality has been the determination of the user′s position and orientation (tracking), appropriate interaction methods for AR applications, graphical problems like the correct illumination of virtual objects and the occlusion of virtual objects by real objects, and the development of powerful and yet lightweight wearable computers. But recently, the development of AR software frameworks gained more and more attention.
An early example of a software framework is COTERIE [ MF96 ]. COTERIE is a set of packages written in Modula-3 that allow to create “Distributed shared objects”, i.e. data objects that are transparently shared by processes on different machines in the network.
Another well-known software-framework is Studierstube [ SFH02 ]. Studierstube is based on the concept of a distributed scene graph (Distributed Open Inventor), and a data flow framework called OpenTracker [ RS01 ] that handles different kinds of trackers.
DWARF [ BBK01 ] is using a concept similar to our own concept described in this paper. AR applications are build by using services that form a distributed data flow graph. CORBA is used for all network communication.
Tinmith [ PT03 ] is using an object store based on Unix file system semantics. Applications can register callbacks on these objects to get notifications when an object changes. Objects are automatically distributed between different processes on the network.
ImageTclAR [ OTX03 ] is an AR framework based on Tcl/Tk. The basic runtime system of the Tcl script language has been extended by modules that provide functionality typically needed by AR applications, e.g. access to video cameras and tracking devices.
MORGAN [ OHFB04 ] is a component-based framework for dynamic multi-user AR and VR projects. A C++ API provides abstract classes to access devices, third-party software and different scene graphs. External devices and applications can be accessed via CORBA.
Other software frameworks that focus on the development of VR applications are VR Juggler [ CNBH02 ] and DIVERSE [ AK02 ]. VRPN [ THS01 ] and IDEAL [ FR00 ] are device management systems that concentrate on the flexible and network-transparent access to VR devices.
Our framework differs from these existing solutions in the way it is used to create MR applications. Our system is not a library that has to be linked into the application code, instead it is a runtime system that allows to interpret MR applications written in a set of markup languages. The major advantage of this approach is that applications are platform independent - the applications run on all platforms the runtime system has been ported to. Furthermore, changing the hardware configuration can be easily done by modifying simple text files, without having to recompile any code. Our system shares these advantages with ImageTclAR, which also allows to develop applications in a scripting language. In contrast to ImageTclAR, our system is based on the concept of a data flow graph, which in our opinion better reflects the event-driven nature of MR applications than a procedural scripting language.
As already mentioned in the introduction, our aim is to create MR applications that can be implemented without much effort, and can be easily ported to miscellaneous hardware configurations. The application logic should be clearly separated from the code necessary to handle hardware devices. Instead of creating large, monolithic C++ applications that have to be recompiled each time the hardware configuration changes, we prefer to have a set of small, reusable software components that are not hard-wired, but can be easily reconfigured by using configuration files that can be adapted to the specific system configuration. The final aim is to create some kind of a runtime system that is able to load and execute MR applications written in a device- and system-independent markup language.
When analysing existing standards and techniques in the computer graphics area, we realised that at least for VR applications the VRML standard to a large degree fulfils our needs. VRML is a markup language that allows to describe the virtual scene in a completely device-independent manner. Besides the classical scene graph, VRML also allows to specify the behaviour of the virtual objects. Each node of the scene graph is a small state machine that is able to receive events, change its state, and to send events depending on the state transition. In fact, the scene graph is supplemented by a data flow graph that contains the application logic. When it is not possible to implement the application logic by using standard nodes, the set of VRML nodes can be extended by using “Script” nodes whose behaviour can be implemented in JavaScript or Java.
Because VRML perfectly fits to our requirements, our framework is based on VRML. But VRML has its weaknesses when used for MR applications. It is designed for Internet applications, i.e. for VR applications running on a desktop PC equipped with standard IO devices like mice and keyboards. It does not provide any means to integrate devices and media used for MR applications, i.e. tracking systems or live video streams. Therefore, we had to extend our VRML framework by a device management system.
Most existing device management systems allow the application to access devices by using a set of abstract device classes, for example “Locator” for tracking systems. But only few provide means to process the data values, e.g. to transform position values of tracking systems into another coordinate system, or to calculate the position and orientation of the user by using video images.
When we planned the architecture of our device management system, we realised that almost all devices used in MR applications produce or consume data streams. We have live video and audio streams from cameras and microphones, streams of position and orientation values from tracking systems, as well as button-press and -release events from game pads or keyboards. Our demand for extensive preprocessing of data streams resulted in the concept of a data flow graph. In this graph, we have nodes that produce data streams (input devices), nodes that transform data streams, and nodes that consume data streams (output devices). Nodes send data values via “Outslots” and receive values via “Inslots”. Like in VRML, outslots and inslots are connected by “Routes”. The following sections describe the components of the data flow graph in more detail.
Nodes are the core component of the data flow graph. There are four types of nodes:
-
Nodes that produce data. These are usually device drivers of input devices, nodes that replay data streams stored on a hard disk, timers etc.
-
Nodes that transform data. Examples are nodes that transform coordinate systems, or video tracking systems that take video frames and transform them to position and orientation values.
-
Nodes that consume data. These are usually device drivers of output devices, nodes that store data streams on a hard disk, etc.
-
Nodes that do not deal with data in any way. This sounds strange at a first glance, but our system currently already has three nodes of this kind: The “Network” node that makes the system network transparent, the “Web” node that provides a user interface to the framework, and the “Inline” node that allows to integrate subgraphs stored in configuration files.
To create a new node, the developer has to derive a new class from the abstract node base class. Nodes can be linked into the application executable (mostly used for the basic, application-independent set of standard nodes provided by the system), or they can be loaded as plugins during runtime (application-specific nodes).
An important design decision that has to be made by the developer of a new node is whether the node uses its own thread or not. Device driver nodes for input devices usually always need to have an own thread, because they have to listen to the port the device is connected to. All other types of nodes do not necessarily need to have their own thread. For example, filter nodes that transform position values into another coordinate system usually directly calculate the new values when they are notified that new data is available. This means that they are in fact driven by the threads of the device driver nodes that provided the incoming data values. On the other hand, filter nodes that have to perform complex calculations, like video trackers, usually get their own threads.
Outslots and inslots are the means used by nodes to exchange data values. Outslots are used to send data to other nodes, and inslots are used to receive data from other nodes. Both outslots and inslots are typed, i.e. you have to specify what kind of data can be send to or received from the slot when you create it. When a node writes data values into an outslot, the outslot automatically transfers copies of these data values to all inslots it is currently connected to. For efficiency reasons, smart pointers are used to transfer large amounts of data, i.e. copying data values into inslots usually just requires to copy a pointer.
For example, the Joystick node consists of two float outslots for the two axes of the joystick, and a boolean outslot for the button. Please note that the actual number of outslots depends on the joystick hardware detected by the joystick driver, i.e. the number of float outslots corresponds to the number of axes provided by the joystick, and the number of boolean outslots corresponds to the number of buttons.
When creating nodes of the data flow graph, the application developer has to specify a unique name for each of these nodes, e.g. “Joystick 1” and “Joystick 2” for two nodes that operate joysticks attached to the system. Each outslot and inslot of a node has a unique label as well, e.g. “Button #1” for the first button of a joystick or “X-Axis” for the x-axis. As a result, each slot in the system can be identified by a unique label consisting of the node name and the slot name, e.g. “Joystick 1/Button #1” for the first button of the first joystick or “Joystick 2/X-Axis” for the x-axis of the second joystick. To connect an outslot to an inslot, the application developer simply has to create a so-called “Route” that maps the label of an outslot to the label of an inslot. Of course, only slots sending and receiving the same data type can be connected by routes.
An interesting feature is the possibility to create hierarchies of data flow graphs by using so-called “Namespaces”. Namespaces can be integrated into data flow graphs just like Nodes. They contain a complete data flow graph consisting of Nodes and Routes. The developer can export any inslot and outslot from the graph contained in the Namespace to the graph that contains the Namespace. This allows application developers to structure their data flow graphs, hide implementation details, and create macros that provide functionality to other developers.
The concept of a data flow graph makes it simple to introduce network transparency into the device management system. Nodes of the graph communicate via edges, so the most elegant solution is to allow edges to be created between nodes on different machines.
Our system does not support network transparency directly. Instead, it is made available by a special node called “Network”. We did this to achieve a clear separation between the device management and the network code.
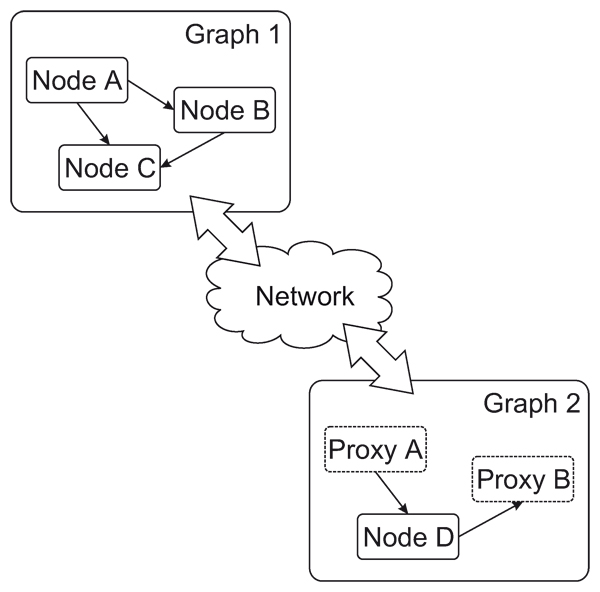
When the Network node starts operation, it automatically connects to all other Network nodes on the network. We are using a technique called “Multicast DNS” [ MDN04 ] to automatically discover all Network nodes available on the network without the need of any configuration or central servers. After connecting, the Network nodes create local proxy nodes for all nodes available on remote machines. These proxy nodes can be used to create edges between nodes on different machines. Figure 1 for example shows two data flow graphs running on different machines. Nodes A and B of the first graph are available as proxy nodes in the second graph. They can be used in the second graph just the same way as local nodes, but any events sent between the proxy nodes and local nodes of the second scene graph are automatically transferred via the network.
Each data value that gets transferred via a network connection needs to be transformed into a system-independent byte stream (serialisation). For each data type, a corresponding codec has to be implemented that performs this serialisation. Such codecs already exist for the default data types provided by the system, but the application programmer has to implement and register codecs for all application-specific data types. Most codecs simply write the data values into the byte stream, but more sophisticated codecs are possible that compress the transferred data, e.g. when transferring video frames.
The structure of the data flow graph is usually not hard coded into the application. Instead, we use a configuration file to store the whole data flow graph on hard disk and to restore the graph when starting the application again.
The format of the configuration file is XML due to the fact that this is a well-known, established standard for storing information. There are numerous parsers, editors and other free tools available.
Even though it is possible to create these XML files by hand, this approach is not recommended. Instead, the application developer uses the integrated user interface of the device management system to create a data flow graph that fulfils his needs. This user interface also allows to save the current status into a configuration file.
There are three ways to restore a saved graph from a configuration file:
-
The user simply loads the configuration by using the integrated user interface.
-
There is a special “Inline” node that allows to integrate configuration files into other configuration files, exactly the same way as the VRML “Inline” node allows to integrate several VRML subgraphs into one scene graph, or the C “include” preprocessor statement allows to integrate several pieces of source code into one file.
Our device management system has an integrated Graphical User Interface (GUI) that allows to modify the data flow graph during runtime. During our work on several MR projects it soon became obvious that it is quite often impossible to do development and debugging directly on the machine the application is running on. Instead, we need means to control our application from other machines in the network.
For example, consider the development of a mobile AR system. Such wearable systems often do not have conventional input devices like keyboards and mice. This means that the user of such a system is not able to operate user interfaces that consist of windows, buttons, sliders etc. Furthermore, these applications usually run in full-screen mode which makes it difficult to watch any debug output in console windows.
Our solution is a small web server that provides a user interface build from HTML pages. This web server is not part of the device management system, instead it is implemented as a node that can be added to the data flow graph. The web server solution allows us to control the device management system from any device that has a simple web browser installed and that is connected via network to the machine the application is running on. The interface allows to inspect the current state of the system, to add and to remove nodes and routes from the graph, to change parameters, and to save the current state to or to restore it from a configuration file.
Figure 2 shows some screen shots of the web interface. In the upper left is an overview of all nodes that currently exist in the device management system. The developer gets status information and error messages. He can remove nodes from the list, and he can add nodes by selecting the type of node from a drop-down menu. It is also possible to get a list of all node types currently available in the system, as well as a short description (upper right of figure 2 ). When the developer decides to create a new node, he gets a page where he can specify parameters, e.g. which camera to use and
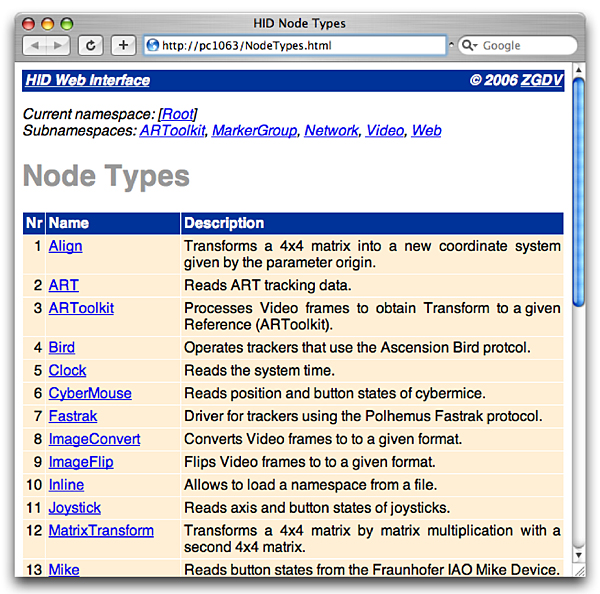
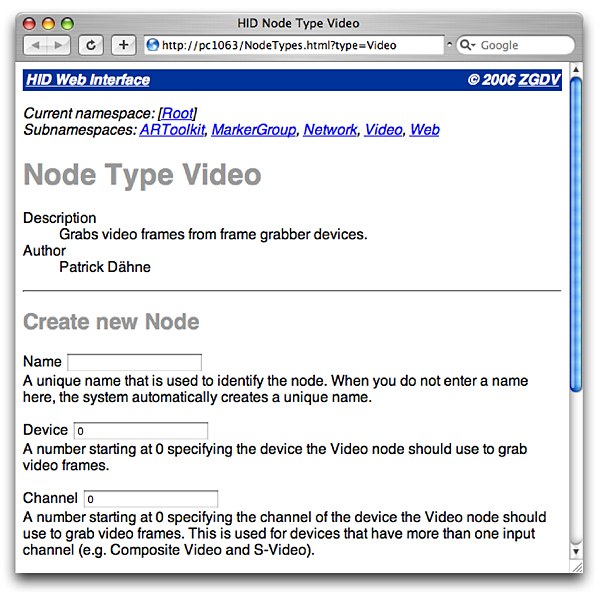
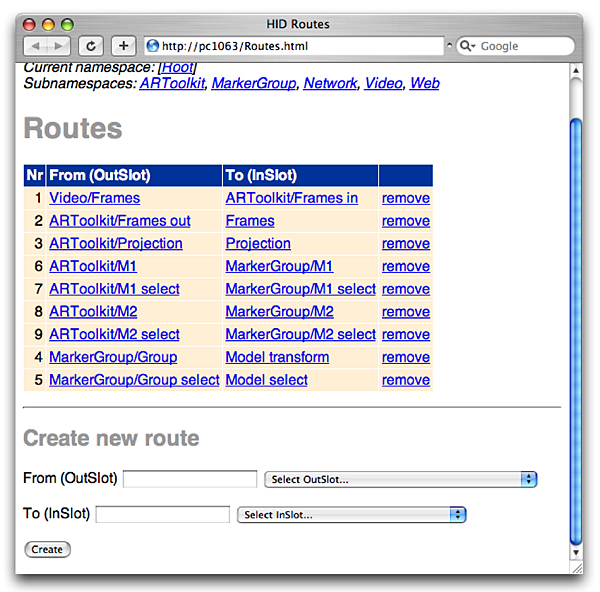
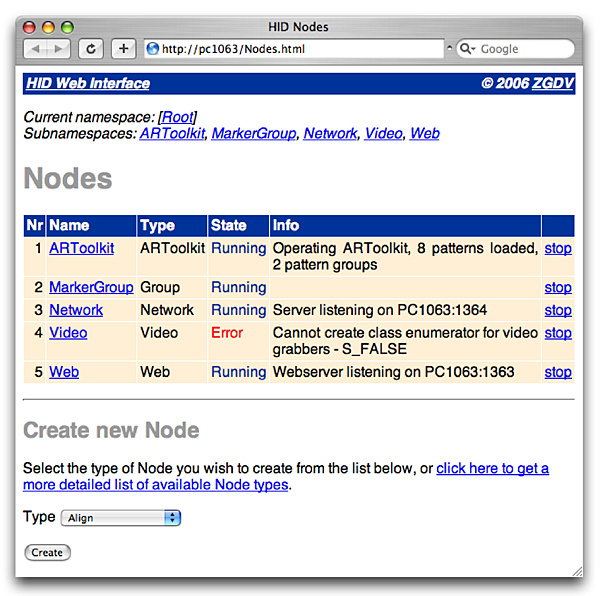
which resolution and image format (see lower left of figure 2 ). Furthermore, there is a page that shows all routes that are currently defined (lower right of figure 2 ). The developer can remove routes, or he can create new routes by selecting outslots and inslots from drop-down menus.
Obviously, the web interface has its limitations. It is completely text-based, which is unhandy for managing a graph. We are looking for better solutions that allow to present a graphical version of the graph, e.g. by using SVG instead of HTML, but SVG is natively only supported by the newest version of the Firefox web browser. Another problem is that the web interface only allows the get a snapshot of the current status of the system - it is not possible to get a notification when some important change in the system occurs. But the benefit of being able to control the system by any external device that has a web browser outweighs these disadvantages by far.
The integration of our device management system into VRML is straightforward. For each field data type available in VRML, we defined a sensor node. These sensors are defined as follows (“x” is just a placeholder for the concrete VRML field types SFBool, SFFloat, …, MFBool, MFFloat, …):
xSensor {
SFString [] label ""
SFBool [] out FALSE
x [in,out] value
}
For example, the sensor for boolean events is defined as
SFBoolSensor {
SFString [] label ""
SFBool [] out FALSE
SFBool [in,out] value FALSE
}
For each sensor in the VRML file we create a corresponding outslot or inslot in the graph of the device management system (if it is an outslot or an inslot depends on the value of the “out” field). The slot gets the name specified in the “label” field. The VRML scene sends data to outslots or receives values from inslots via the “value” field. For more information about the design rationales of the sensor nodes, see [ BDR04 ].
Applications written in scripting and markup languages often suffer from the prejudice that they are inefficient. This is not generally true. In our system, we do not use scripting and markup languages to handle time-consuming tasks like video tracking and rendering - instead, they are only used to set up the structure of the system. Video tracking and rendering are implemented in an efficient compiled language (C++) - only the interconnection between the software modules (nodes) and the application logic is controlled by scripts. The communication between the modules of course introduces some overhead - but this overhead is small compared to the calculation time needed by tracking and rendering. Furthermore, the overhead is comparable to the overhead of conventional frameworks.
The proposed architecture simplifies and speeds up the development of new Mixed Reality applications. A prefabricated pool of nodes interfacing various devices allows the developer to choose the appropriate devices for the desired application.
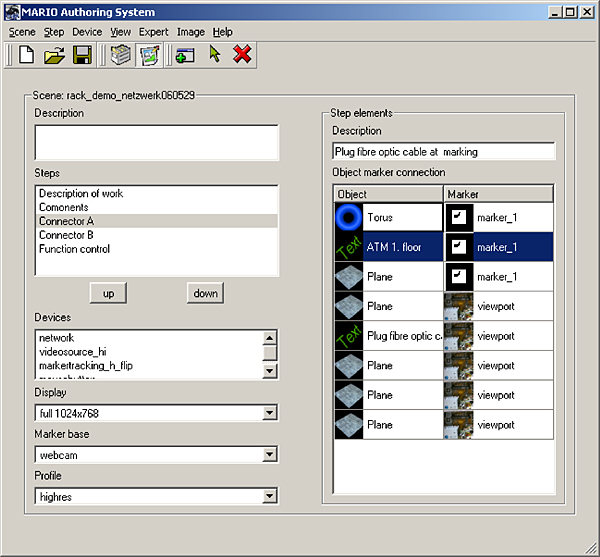
Development of applications using the proposed framework can be done by creating configuration files by hand, but even at that high level the creation of simple applications is error prone and becomes tedious. An authoring framework which offers existing Nodes and creates the required Routes based on prepared configurations is recommended. The following application example has been developed using a simple authoring framework which offers to create step-by-step guides interactively. The authoring application manipulates the data flow graph and the scene graph of our Mixed Reality framework using its external authoring interface, so that the current state is always visible to the author during the whole authoring process. As the authoring is based on camera views of the real scene, it is possible to use a live video stream or alternatively to load previously taken camera images of the scene in order to place the augmentations. The augmentations can be chosen from a content database or from a set of basic augmentation elements like text or simple geometries, see figure 3 . The whole processing pipeline including the tracking tracking algorithms is driven with these images, and the result is visible in the output window of the mixed reality framework. The result of the authoring process is a set of configuration files, one for the data flow graph, and one for the scene graph, which can then be used with the mixed reality framework.
More sophisticated Mixed Reality applications require an enhanced authoring framework, which incorporates e.g. nonlinear storytelling techniques like described in [ GMB06 ] to provide more opportunities in design and composition for the author and better interaction as well as more information to the user. As the main focus of this paper is on the design of the data flow graph, authoring will not be discussed in detail here.
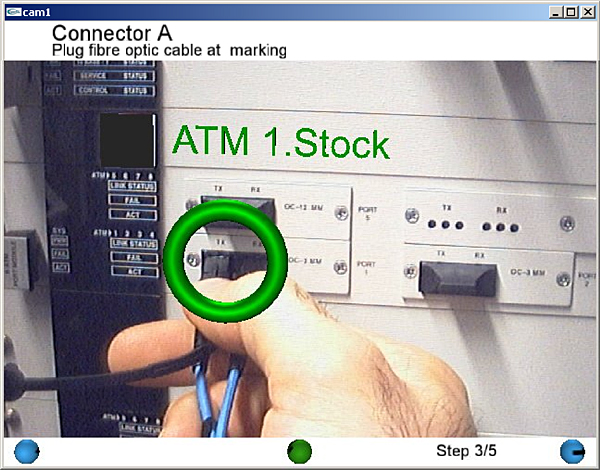
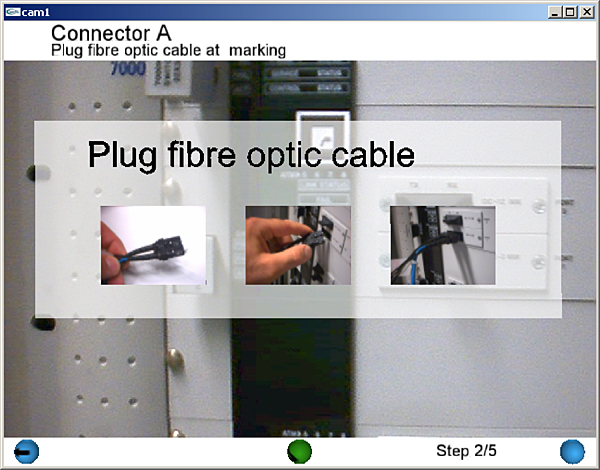
This section focuses at the development of an Augmented Reality application using a marker-based video tracking system based on the well known ARToolKit [ KB99 ]. A common task in Augmented Reality applications is to enhance the view to a real scene with virtual objects containing specific information about real objects. We chose a technical scenario, where the augmented view on a network-switch device explains the allocation of its connectors, which are known from a database, and information on how to establish a defined cable connection.
Detailed instructions can be used to augment the users view, e.g. allowing the user a plug a cable to the correct connector of a network device, see figures 6 and 5 .

The hardware components for the user are a laptop, a standard USB video camera for the observation of the real scene and a Sony LDI-100 high resolution head mounted display for the observation of the augmented scene, see figure 4 . Three buttons are mounted on the hand-held display to enable simple user interactions like switching application modes or adjusting parameters.
Rendering is done with the Avalon [ BDR04 ] rendering framework which utilises VRML/X3D. The described device management system is integrated, data can be received via VRML sensor nodes. One system-specific extension we use is the Viewfrustum node which allows to use a projection matrix which is calculated by the external tracking node. The augmented environment, by means of virtual objects to be included in the augmented view for the user is defined in the scene-graph. The system is implemented as a video-see through, so video images are drawn as background to the application window.
The scene-graph includes a Transform node and additional child nodes representing the corresponding virtual object for each marker. Viewfrustum, Transform node and Switch node are updated according to corresponding sensor nodes, as illustrated in figure 7 .
To implement the mentioned AR application, we are able to select prepared modules, represented as nodes which can be inserted into our data flow graph.
The video tracking system consists of a video source, the computer vision algorithms and optional filters that allow e.g. grouping of several markers. The nodes we use are described briefly in the following. The application can be implemented by setting up a data flow graph holding the corresponding nodes and routes connecting corresponding inslots and outslots, see figure 8 for a sample configuration file. When the application starts, the nodes and routes are created, and the system is ready for use. The integrated web interface shows all nodes and routes that have been created and allows to examine their state, sources of error can easily be determined and eliminated. For example, if there is no camera connected to the system, the video node will fail to initialise resulting in a blank application screen. The web interface allows a look inside the system and shows the existing nodes and their current state.
The video node produces video data by interfacing the camera and, if necessary, converting compressed video formats to a suitable uncompressed format for the vision algorithms and the display system. Each frame of the video sequence is pushed through an SFImage outslot as a single image. Optional parameters allow to specify image size or image format to initialise the video node in a suitable way.
The video tracking node provides the tracking algorithm to compute the transformation of each recognised marker in the video image.
Video frames are received through an SFImage inslot and processed with computer vision algorithms, which allow to recognise trained patterns. The Tracking Node has to be initialised with a number of pattern descriptions. This is done by supplying a parameter string containing the pattern name and the URL of the corresponding pattern definition files, and the pattern size for each used marker. Other parameters are the URL of the camera calibration file, the near and far values for the view frustum and the image segmentation threshold. The files are retrieved and the module creates the outslots for each pattern. The rendering system needs to be supplied with the transformation of the recognised patterns to update the corresponding Transform nodes in its scene-graph. To toggle the visibility of the corresponding object, the information whether it has been detected or not is also provided. A sample VRML file is shown in figure 9 . Two outslots are created for each pattern, one outslot of type SFMatrix, and another outslot of type SFBool. All marker transformations are calculated for the camera model defined by the camera calibration file and additional near and far plane parameters. The corresponding projection matrix for the rendering system is supplied through an additional outslot of type SFMatrix. The vision algorithms are time-consuming, to avoid displaced augmentations the processed video frames are forwarded through an SFImage outslot at the same time the marker information is passed though the corresponding outslots.
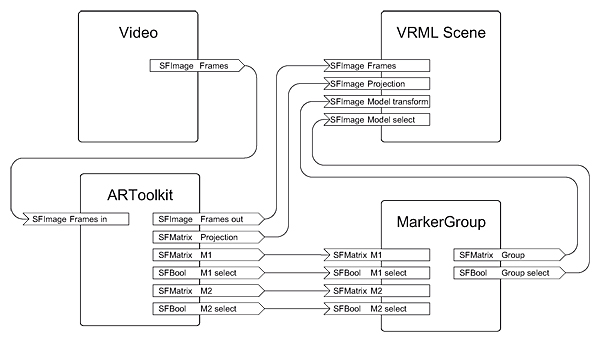
Figure 8. XML configuration file for the device management.
<?xml version="1.0"?>
<HID versionMajor="1" versionMinor="0">
<Route from="Video/Frames" to="ARToolkit/Frames in"/>
<Route from="ARToolkit/Frames out" to="Frames"/>
<Route from="ARToolkit/Projection" to="Projection"/>
<Route from="ARToolkit/M1" to="MarkerGroup/M1"/>
<Route from="ARToolkit/M1 select" to="MarkerGroup/M1 select"/>
<Route from="ARToolkit/M2" to="MarkerGroup/M2"/>
<Route from="ARToolkit/M2 select" to="MarkerGroup/M2 select"/>
<Route from="MarkerGroup/Group" to="Model transform"/>
<Route from="MarkerGroup/Group select" to="Model select"/>
<Node type="Video" label="Video">
<Parameter name="Width" value="640"/>
<Parameter name="Height" value="480"/>
<Parameter name="Format" value="RGB24"/>
<ExternalRoute internal="*" external="{NamespaceLabel}/{SlotLabel}"/>
</Node>
<Node type="ARToolkit" label="ARToolkit">
<Parameter name="camera_param" value="http://pc978/philips.dat"/>
<Parameter name="far" value="5000"/>
<Parameter name="near"value="50"/>
<Parameter name="threshold" value="100"/>
<Parameter name="quality" value="0.7"/>
<Parameter name="markers" value="m1,http://pc978/markers/m1.patt,15;
m2,http://pc978/markers/m2.patt,15;/>
<ExternalRoute internal="*" external="{NamespaceLabel}/{SlotLabel}"/>
</Node>
<Node type="Group" label="MarkerGroup">
<Parameter name="name" value="group"/>
<Parameter name="mode" value="linear"/>
<Parameter name="markers" value="m1,0 0 0,0 0 0 1;
m2,122 -404.5 0,0 0 0 1;"/>
<ExternalRoute internal="*" external="{SlotLabel}"/>
</Node>
<Node type="Network" label="Network">
<Parameter name="ID" value="3002"/>
<ExternalRoute internal="*" external="{SlotLabel}"/>
</Node>
<Node type="Web" label="Web">
</Node>
</HID>
Figure 9. VRML file for the rendering system.
#VRML V2.0 utf8
DEF matrixCam Viewfrustum{
zNear 50.0
zFar 5000.0
}
DEF projectionSensor SFMatrixSensor {
label "Projection"
description "Projection Sensor"
}
ROUTE projectionSensor.value_changed TO matrixCam.set_projection
DEF imageBG ImageBackground {
texture DEF image PixelTexture {}
}
DEF imageSensor SFImageSensor {
label "Frames"
description "Image Sensor"
}
ROUTE imageSensor.value_changed TO image.set_image
DEF model_trans MatrixTransform {
children [
DEF inlineNode Inline {
url"http://pc990/augmentation.wrl"
}
]
}
DEF modelSensor SFMatrixSensor {
label "Model transform"
description "Model transform Sensor"
}
DEF modelSelectSensor BoolSensor {
label "Model select"
description "Model select Sensor"
}
ROUTE modelSensor.value_changed TO model_trans.set_matrix
ROUTE modelSelectSensor.value_changed TO model_trans.set_visible
DEF urlSensor SFStringSensor {
label "augmentation_url"
description "augmentation url Sensor"
}
ROUTE urlSensor.value_changed TO inlineNode.set_url
Tracking with single markers does often not satisfy the needs of the application, because some markers get occluded or unrecognisable when the camera is moved. The use of redundant markers is possible if the displacement in between is known and remains fixed during runtime. A group node provides inslots for each pattern and calculates the group transformation by applying appropriate offset transformations to the pattern transformations, which is mapping each marker transformation to a group transformation. The inslots and corresponding offset transformations have to be provided as parameters, see figure 8 for example. The group transformations for each pattern are then combined by applying a linear combination of transformations as introduced in [ Ale02 ]. The group transformation is then provided at the outslot of the group-node.
The application above has been enhanced to allow a simple communication between user and an “remote” expert at a different location. The expert is supplied withthe camera images of the distant user, and is able to move a pointer and place additional virtual objects and instructions into the view of the worker. Furthermore a bidirectional speech communication is necessary to extend the information interchange.
The expert requires a workstation with network connection, sound hardware and a headset. Interactions are done by mouse and keyboard. The user of the AR system has the equipment mentioned above plus a headset and network connection.
Two nodes at each system enable sound recording and playback. The sound-record node accesses the digitiser of the installed sound hardware, and provides the PCM data on an outslot of type SFSample. The number of bits to sample, sample rate etc. are optional parameters, which can be provided for initialisation. The counterpart is the sound-play node, which receives the samples using an inslot of type SFSample and passes the sample values to the digital/analog converter of the sound hardware.
The Network transparency of the system allows to establish routes between inslots and outslots on different machines. Video image and tracking information are routed to the rendering system of the remote expert, which has the same scene-graph loaded. Mouse interactions are grabbed by the mouse node and provided on an outslot of type SFVec2f. The user of the AR system has an overlay which is shifted on the screen according to the mouse movements of the remote expert. The geometry of the overlay can be modified by the remote expert by changing the URL field of an Inline node in the scene graph of the AR-System. The URL needs to be specified by the remote expert, the corresponding string is transferred via an SFString outslot at the expert system and an inslot in the rendering system of the user.
In this paper we presented the framework we use for the development of our MR applications. It is currently available on several operating systems (Windows, MacOS X, Linux, IRIX and SunOS) and as a Java package (written in pure Java, therefore running on all systems providing a Java virtual machine). The experiences we gain from the practical use of the proposed system are incorporated into further development steps of the system. Our current research focus is the identification, design and implementation of new nodes that further ease the development of MR applications.
[AK02] The DIVERSE Toolkit: A Toolkit for Distributed Simulations and Peripheral Device Services, VR 2002, 2002.
[Ale02] Linear combination of transformations, ACM Transactions on Graphics (TOG) (2002), no. 3, Special Issue: Proceedings of ACM SIGGRAPH 2002, 380—387, issn 0730-0301.
[BBK01] Design of a component-based augmented reality framework, IEEE and ACM International Symposium on Augmented Reality (ISAR'01), pp. 45—54, 2001, isbn 0-7695-1375-1.
[BDR04] Utilizing X3D for Immersive Environments, Proceedings of the ninth international conference on 3D Web technology 2004 (WEB3D'04), pp. 71—78, 2004, isbn 1-58113-845-8.
[CNBH02] VR Juggler - An Open Source Platform for Virtual Reality Applications, Proceedings of 40th AIAA Aerospace Sciences Meeting and Exhibit '02, 2002, isbn 0-7695-0948-7.
[FR00] Integration of Multidimensional Interaction Devices in Real-Time Computer Graphics Applications, Computer Graphics Forum (2000), no. 3, 313—319, issn 1467-8659.
[GMB06] Story Pacing in Interactive Storytelling, Proceedings of the International Conference on E-learning and Games (Edutainment), 2006, pp. 419—428.
[KB99] Marker Tracking and HMD Calibration for a Video-Based Augmented Reality Conferencing System, 2nd IEEE and ACM International Workshop on Augmented Reality 1999, pp. 85—94, San Francisco, CA.
[MDN04] Multicast DNS, IETF draft, http://www.multicastdns.org/, 2004, visited 2007/02/06.
[MF96] Language-level support for exploratory programming of distributed virtual environments, Proceedings of the 9th annual ACM symposium on user interface software and technology UIST'96, pp. 83—94, 1996, isbn 0-89791-798-7.
[OHFB04] The MORGAN Framework: Enabling Dynamic Multi-User AR and VR Projects , Proceedings of the ACM Symposium on Virtual Reality software and technology VRST'04, pp. 166—169, 2004, isbn isbn 1-58113-907-1.
[OTX03] ImageTclAR: A Blended Script and Compiled Code Development System for Augmented Reality, Proceedings of the International Workshop on Software Technology for Augmented Reality Systems, 2003.
[PT03] An object-oriented software architecture for 3D mixed reality applications, Proceedings of the second IEEE and ACM International Symposium on Mixed and Augmented Reality (ISMAR'03), p. 247, 2003.
[RS01] An Open Software Architecture for Virtual Reality Interaction, Proceedings of the ACM Symposium on Virtual Reality software and technology VRST'01, pp. 47—54, 2001, isbn 1-58113-427-4.
[SFH02] The Studierstube Augmented Reality Project, Presence: Teleoperators and Virtual Environments (2002), no. 1, 33—54, issn 1054-7460.
[THS01] VRPN: A Device-Independent, Network-Transparent VR Peripheral System, Proceedings of the ACM symposium on Virtual Reality VRST'01, pp. 55—61, 2001, isbn 1-58113-427-4.
Volltext ¶
-
 Volltext als PDF
(
Größe:
1002.8 kB
)
Volltext als PDF
(
Größe:
1002.8 kB
)
Lizenz ¶
Jedermann darf dieses Werk unter den Bedingungen der Digital Peer Publishing Lizenz elektronisch übermitteln und zum Download bereitstellen. Der Lizenztext ist im Internet unter der Adresse http://www.dipp.nrw.de/lizenzen/dppl/dppl/DPPL_v2_de_06-2004.html abrufbar.
Empfohlene Zitierweise ¶
Helmut Seibert, and Patrick Dähne, System Architecture of a Mixed Reality Framework. JVRB - Journal of Virtual Reality and Broadcasting, 3(2006), no. 7. (urn:nbn:de:0009-6-7774)
Bitte geben Sie beim Zitieren dieses Artikels die exakte URL und das Datum Ihres letzten Besuchs bei dieser Online-Adresse an.
-
 News
News