Document Actions
VRIC 2008
Transfer of spatial knowledge from a virtual environment to reality: Impact of route complexity and subject’s strategy on the exploration mode
-
Grégory Wallet
 Université Victor Segalen Bordeaux II
Université Victor Segalen Bordeaux II
- Hélène Sauzéon Université Victor Segalen Bordeaux II
- Jérôme Rodrigues Université Victor Segalen Bordeaux II
- Bernard N’Kaoua Université Victor Segalen Bordeaux II
Abstract
- published: 2009-02-05
Keywords
- Exocentric/Egocentric referential/strategy
- Exploration mode
- Knowledge transfer
- Route complexity
- Spatial cognition
- Virtual reality
- Wayfinding
- DOI: 10.20385/1860-2037/6.2009.4
- URN: urn:nbn:de:0009-6-17577
-
swd:
- 4399931-1
- 4233933-9
- 4311916-5
- 4031370-0
Transfer of spatial knowledge from a virtual environment to reality:
Impact of route complexity and subject's strategy on the exploration
mode
urn:nbn:de:0009-6-17577
Abstract
The use of virtual reality as tool in the area of spatial cognition raises the question of the quality of learning transfer from a virtual to a real environment. It is first necessary to determine with healthy subjects, the cognitive aids that improve the quality of transfer and the conditions required, especially since virtual reality can be used as effective tool in cognitive rehabilitation. The purpose of this study was to investigate the influence of the exploration mode of virtual environment (Passive vs.Active) according to Route complexity (Simple vs.Complex) on the quality of spatial knowledge transfer in three spatial tasks.
Ninety subjects (45 men and 45 women) participated. Spatial learning was evaluated by Wayfinding, Sketch-mapping and Picture classification tasks in the context of the Bordeaux district. In the Wayfinding task, results indicated that active learning in a Virtual Environment (VE) increased the performances compared to the passive learning condition, irrespective of the route complexity factor. In the Sketch-mapping task, active learning in a VE helped the subjects to transfer their spatial knowledge from the VE to reality, but only when the route was complex. In the Picture classification task, active learning in a VE when the route was complex did not help the subjects to transfer their spatial knowledge. These results are explained in terms of knowledge levels and frame/strategy of reference.
Keywords: Virtual reality, Spatial cognition, Knowledge transfer, Exploration mode, Exocentric/Egocentric referential/strategy, Route complexity, Wayfinding
Subjects: Virtual reality, Route, Spatial knowledge, Know-how-transfer
Spatial cognition refers to the capacity and the cognitive processes necessary to move in an environment without getting lost. This capacity needs the acquisition of three knowledge levels [ SW75, PL81 ]: Landmark knowledge; Route knowledge and Survey knowledge (general configuration where signs and routes are linked). Firstly, the acquisition of several landmarks inside the environment is the basis of spatial cognition. The shape, the structure, and/or the socio-cultural meaning of signs allow their integration [ Gol99 ]. Secondly, the subject acquires the ability to link the landmarks and learns routes between them. At this level, the subject is able to build a mental representation of a route from a departure point to an arrival point using the different landmarks [ TG83 ]. Finally, the subject is able to develop survey knowledge. He builds a topographical representation of the environment containing all of the associated spatial information (i.e., landmarks and routes) such that he can infer the entire environment representation, can estimate Euclidean distances and contemplate shortcuts [ PDH89 ]. At this final level of knowledge, the representation built is similar to a “plane view” also called survey-type knowledge. The acquisition of these three knowledge levels (i.e., Landmark, Route and Survey) provides cognitive maps [ Tol48 ]. The cognitive map refers thus to the more elaborate mental and exocentric representations of spatial environment [ Kit94 ] including the shape of spots, lines and surfaces [ Scr00 ].
These three acquisition levels are related to a spatial frame of reference according to the distinction between the Egocentric (referring to the body) and the Exocentric (or allocentric) referential (referring to fixed external landmarks that require the out-of-focus capacity to imagine a different viewpoint from one's own viewpoint) [ PL81 ]. The egocentric referential corresponds to the first two knowledge levels (i.e., Landmark and Route) while the exocentric referential to the third knowledge level (Survey), also called “cognitive map”. Moreover, the referential frame influences the strategy of navigation [ Ber99 ]: egocentric strategy or exocentric strategy. Different tasks are designed to test separately the subject's strategy: for example, a picture (with landmarks) classification task for egocentric strategy and a sketch-mapping task for an exocentric strategy. Spatial cognition, including the three acquisition levels as well as the egocentric or exocentric referential, is classically assessed by route execution tasks. These tasks consist of Wayfinding, which is the capacity to learn and to replicate a route in the environment. Wayfinding might be simply driven more by an egocentric spatial representation, as in the picture classification.
According to Fuchs [ FMP01 ], “the aim of virtual reality is to allow a person (or several people) to perform a perceptive-motor as well as a cognitive activity in an artificial world, numerically created, which could be a fantasy world, symbolical or a simulation of some aspects of the real world”. Several advantages in the use of virtual reality have been highlighted and notably in cognitive and neuropsychological applications. For example, VE applications provide more naturalistic cognitive assessment because they offer a plausible simulation of the following; the real world and the subject's daily activities with regard to the subject's safety (in the case of simulated dangerous situations); experimental control (parameters and immediate retroaction); the specific user's needs (i.e., configuration/flexibility of application according to use and users); etc. Consequently, VE applications are currently seen as the future neuropsychological tools for evaluating spatial cognition [ RBR05, Kli06 ].
Studies on spatial knowledge transfer from virtual to reality indicate that subjects increase their spatial learning in real environments by using the appropriate characteristics from the virtual environment e.g. [ WBKP96, AHC96, WHK98, RMH99, FSP00, Vid02, Lia08 ]. In other words, because VE reinstates relevant characteristics from reality, positive knowledge transfer is efficient [ PC01 ]. One of the factors identified as promoting transfer is the exploration mode of navigation in VE. Outside the virtual reality area, the beneficial effect of an active exploration mode is well known (e.g., memory of a motor sequence is better after active rather than passive learning). This beneficial effect increases with the increasing complexity of the task [ EZMS94 ]. In VR, Wilson et al. [ WFGS97 ] distinguish two types of exploration: active vs. passive mode. Active exploration involves the subject's interaction with the interface (e.g., joystick, glove, keyboard, etc.) while passive exploration does not. Generally, exploration is seen as active when the individual can move with few constraints in the VE, and as passive when the subject is constrained to visualize a pre-determined recorded route. Pruch and Corazzini [ PC01 ] indicate that some experiments demonstrate a superior effect of active exploration for spatial knowledge acquisition e.g. [ PVG95, CB99, CGMV02, FAP03 ], whereas others do not demonstrate any difference, or even an inferior effect compared to the passive mode e.g. [ WFGS97, GVKB01, WP02, PW04 ]. These inconsistent findings could be explained in the light of the distinction between the exocentric and egocentric referential. The studies mentioned used different VEs and spatial recall tasks that vary in their complexity and, thus, in the difficulties of building an exocentric cognitive map. In other words, the benefit of active exploration occurs only when a high exocentric knowledge level is required (by the VE complexity and/or spatial recall tasks used).
In this context, the aim of this research was to investigate the influence of the exploration mode of a virtual environment (Passive vs. Active) according to Route complexity (Simple vs. Complex) on the quality of spatial knowledge transfer in three spatial tasks that require either egocentric or exocentric referential, or both. The final objective is to obtain valid tools for cognitive rehabilitation.
Participants were 90 student volunteers from Victor Segalen Bordeaux 2 University (45 men and 45 women, on average of 20 years old). All the subjects were native French speakers and right-handed. 45 subjects were in the Simple Route condition and 45 were in the Complex Route condition. For each condition, 3 groups of 15 subjects were formed, corresponding to the three Type of Learning conditions (Passive Virtual vs. Active Virtual vs. Real). To balance the groups, subjects performed paper-pencil tests assessing their spatial skills, as follows:
-
The Survey Aptitude test (only parts 5 and 6) [ GZ81 ] where part 5 assesses the spatial orientation factor (i.e., the ability to imagine an object's appearance from different perspectives) and part 6 assesses the spatial visualization factor (i.e., the ability to recognize an object from different angles);
-
The mental rotation test [ VK78 ], assessing the spatial visualization factor through the ability to execute mental rotations on an object.
There were no significant differences in performance on this test between each group.

The material was composed of two environments: real vs. virtual. The real environment was an area near Bordeaux hospital (Figure 1). We used a real environment for comparison between the learning in the virtual environment (Passive vs. Active) and optimal learning (in reality) from which we infer the quality of the learning transfer from Virtual to Real. The virtual environment was a virtual replica of the real environment. It was created in 2006 by engineering students from the Cognitive Institute using Virtools ©software. The environment contained many details (Fig. 1). The designers performed metric analysis of the terrain in order to reproduce faithfully the dimensions and distances in the real environment. They also took photos of several buildings facades in order to incorporate them into the virtual environment. The itinerary was presented to subjects on the basis of an egocentric referential, at head height, as if the subject were looking through a camera. Significant landmarks (e.g., signpost, sign, urban furniture, etc.) as well as a hearing environment (i.e., urban sounds) were included in the VE.
To manipulate the exploration mode in the VE under the passive condition, participants visualized only the route without any interaction, whereas under the active condition they used a joystick offering interaction with the VE.
To manipulate route complexity, two different route conditions were proposed as follows:
-
Simple route: 787 meters, 9 streets, 12 intersections, 10 direction changes;
-
Complex route: 1457 meters, 14 streets, 18 intersections, 18 direction changes.
The material used in the virtual reality room was a personal computer Dell©(3 GHz, 5Go in RAM) with NVidia©Quadro FX 4400 graphics card, F1+©projector, a 2 x 1.88 meter screen (to allow the correct immersion of the subject) and a Logitech force 3D pro joystick for the active exploration mode. The participants were sitting two meters from the display screen
After reading the experimental instructions, the experiment procedure was as follows for each participant:
-
Training phase (10 min): the subject visualized a VE similar at the VE used in learning phase;
-
Learning phase of the route(15 min on the simple route and 25 min on the complex route): depending on the random allocation of the conditions, the participant visualized either the simple route or the complex route. In each condition, the participants were divided into three groups according to the exploration mode: (1) active virtual environment (the participant used a joystick offering an interaction with the VE, the route was still pre-established by the researcher who gave instructions about the direction) vs. (2) passive virtual environment (the participant only visualized the route recorded and without any interaction) vs. (3) the real environment (the participant actually did the route following instructions). This latter condition was the control condition to provide the baseline measure for an optimal and natural spatial learning transfer (from real to real) e.g., Richardson et al. 1999 [ RMH99 ]; Waller et al. 2001 [ WHK98 ].
-
Test phase: for this phase we used three tasks frequently used in this type of experiment. The order was counterbalanced. The three tasks were:
-
Wayfinding task in reality: Reproduction of the route in reality (without a time limit). The participant had to replicate the learned route in reality. Direction errors and hesitations (when the participant stopped and turned his head in two different directions before setting off again on his walk) were noted. In case of error, the participant was stopped and was asked to take another direction. In some cases, participants made a hesitation followed by a directional error, or even made several directional errors in the same intersection. In all cases, each error or hesitation was counted.This task can be performed with an exocentric as well as with an egocentric referential.
-
Sketch-mapping task: Freehand reproduction in the form of a sketch of the visualized route (10 min). The required sketch was a simple outline sketch (the connected segments). The task was to indicate the direction changes and to count them. This task refers to an exocentric referential.
-
Picture-classification task: Make a series of pictures taken along the route in chronological order (10 min). This task refers to an egocentric referential.
-
As described above, three experimental tasks were undertaken by the subjects (i.e., Wayfinding, sketch mapping, and picture classification). For each one, the results were analyzed with ANOVA [3 (Exploration: Passive virtual vs. Active virtual vs. Real) x 2 (Route: Simple vs. Complex)] with independent measures.
This task provides two indicators: errors of direction and hesitation during the route replication in the real environment. The results were then analyzed using these two indicators and were expressed in percentages.
For directional errors, an ANOVA applied on these percentages revealed a significant effect of Exploration [F(2,84 = 23,293; p < 0.0001)] and Route [F(1,84) = 23,748; p < 0.0001]. Examination of the means indicated that performances were better (i.e., fewest errors) when the subjects were trained in the real world, then actively navigated in the VE, then passively moved in the VE. In addition, higher performances were obtained on the simple rather than the complex route condition. The interaction “Presentation x Route” was not significant [F(2,84) = 1,607; p > 0,20] indicating a similar performance pattern (i.e., learning in a real environment > active learning in a VE > passive learning in a VE), irrespective of the route complexity.
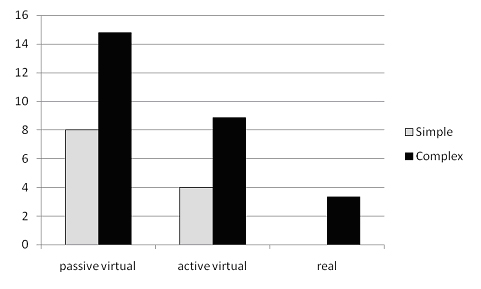
For hesitations, an ANOVA applied on these percentages revealed a significant effect of Exploration [F(2,84) = 26,213; p < 0,0001] and Route [F(1,84) = 20,820; P < 0,0001]. Examination of the means indicated that performances were better (i.e., fewest errors) when the subjects were trained in the real world, then actively navigated in the VE, then passively moved in the VE. Again, higher performances were obtained in the simple rather than the complex route condition. The interaction “Exploration x Route” was not significant [F(2,84) = 0,840; p > 0,43], indicating a similar performance pattern (i.e., learning in a real environment > active learning in a VE > passive learning in a VE), irrespective of route complexity.
Therefore, on the Wayfinding task (Fig. 2 and 3), active learning in a VE increased the performance of the subjects compared to passive learning in a VE. Although the performance did not reach the same level as that of the subjects who learned in the real environment, it may be concluded that active learning in a VE helped the subjects to transfer their spatial knowledge from the VE to reality. Furthermore, as no significant interactions were observed (i.e., Exploration and Route factors), the results also demonstrated that this conclusion in the Wayfinding task is true, whatever the route complexity.
Figure 2. Percentage Errors in the Wayfinding task according to Exploration mode and Route conditions.
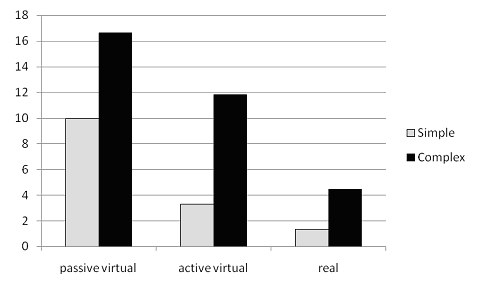
Figure 3. Percentage Hesitations in the Wayfinding task according to Exploration mode and Route conditions.
In this task, the experimenter counted errors in changes of direction on the sketches. Then, the score was compared to the best potential score (i.e., 10 or 18 in the simple or complex route condition, respectively) to obtain percentages.
An ANOVA applied to these percentages revealed a significant effect of Exploration [F(2,84) = 35,287; p < 0,0001] and Route [F(1,84) = 13,390; p < 0,01]. Examination of the means indicated that performances were better (i.e., fewest errors) when the subjects were trained in the real world, then actively navigated in the VE, then passively moved in the VE. Once again, a higher performance was obtained in the simple rather than the complex route condition. The interaction “Exploration x Route” was significant [F(2,84) = 21,276; p < 0,0001], indicating that in the simple route condition, the performances were almost similar irrespective of the exploration condition, while in the complex route condition, an active virtual condition enhanced performances nearly to the level of those obtained in the real condition compared to the passive condition. In other words, subjects who learned the complex route in an active VE performed clearly better than those who learned the same route in a passive VE.
In the sketch-mapping task (Fig. 4), active learning in a VE helped the subjects to transfer their spatial knowledge from the VE to reality, but only when the route was complex.
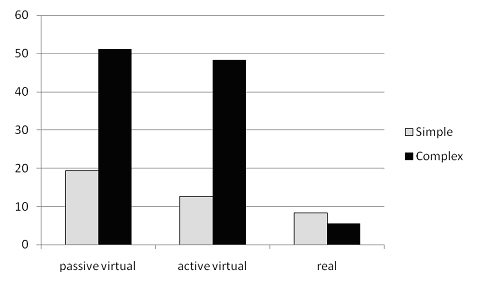
In this task, the experimenter counted the classification errors. Then, the score was compared to the best potential score (i.e., 12) to obtain the percentages.
An ANOVA applied on these percentages revealed a significant effect of Exploration [F(2,84) = 57,064; p < 0,0001]; and Route [F(1,84) = 85,707; p < 0,0001]. Examination of the means indicated that performances were better (i.e., fewest errors) when the subjects were trained in the real world, then actively navigated in the VE, then passively moved in the VE. Higher performances were obtained in the simple rather than the complex route condition.
The interaction “Exploration x Route” was significant [F(2,84) = 27,561; p < 0,0001], indicating that in the simple route condition, performances were almost similar irrespective of the exploration condition while in the complex route condition, both active and passive virtual condition decreased performances compared to the real condition. In other words, subjects who learned the complex route in VE received no benefit from the active condition.
In contrast to the Sketch mapping task, active learning when the route was complex in VE did not help the subjects in the Picture classification task (Fig. 5) to transfer their spatial knowledge from the VE to reality.
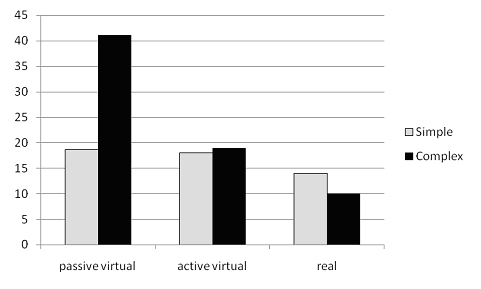
Figure 5. Percentage Errors in the picture classification task according to Exploration mode and Route.
The aim of this research was to investigate the influence of the virtual environment exploration mode (Passive vs. Active) according to the Route complexity (Simple vs. Complex) on the quality of spatial knowledge transfer in three spatial tasks.
For the Wayfinding task and concerning the spatial knowledge transfer, our study shows that a positive transfer from a VE to reality. Comparable findings were reported in other studies e.g., [ WBKP96, AHC96, WHK98, RMH99, FSP00, Vid02, Lia08 ]. Nevertheless, this positive transfer was less efficient than that provided by the real learning condition. This is likely due to the wellknown principle of appropriate processing transfer [ MBF77 ] where learning performance is optimized with perfect matching of the learning and recall conditions. Therefore, active learning in a VE increased the performance of the subjects compared to passive learning. These results support our main assumption and are in accordance with previous findings e.g., [ PVG95, CB99, CGMV02, FAP03 ]. For example, Péruch et al. [ PVG95 ] found that spatial learning, as tested with a Wayfinding task, was greater in an active than a passive condition. The authors suggested that recall of spatial layout was better in an active learning condition, as the subjects were able to respect perception-action coupling and to correlate motor and visual inputs. The higher performance in the active learning condition was thus explained by optimized integration, even if others factors may have been involved such as an increase in motivation and task involvement due to interactivity (i.e., by the joystick).
By contrast, for the sketch-mapping and picture classification tasks, the benefit from active learning in VE was dependent on the route complexity factor (i.e., interaction effects). In the sketch-mapping task (exocentric referential), active learning in a VE helped the subjects to transfer their spatial knowledge from the VE to reality, but only when the route was complex. Conversely, in the Picture classification task (egocentric referential), active learning for a complex route in VE did not help the subjects to transfer their spatial knowledge from the VE to reality.
The impact of route complexity on the benefit of active learning on both sketch-mapping and the picture classification tasks indicates that the benefit derived from active learning is induced by spatial knowledge level demands. When the recall task is based on exocentric knowledge (i.e., sketch mapping) and requires construction of a cognitive map, a benefit is obtained in complex route. When the recall task is based on egocentric knowledge (i.e., picture classification), no benefit is obtained irrespective of route complexity. This suggests that the benefit from active learning specifically promotes the construction of exocentric rather than egocentric spatial knowledge. It can therefore be assumed that the optimized perception-action integration induced by active learning specifically favors the construction of exocentric spatial knowledge.
The main conclusion from this study is that spatial knowledge transfer can be boosted by active learning if the task requires the full use of exocentric spatial knowledge (i.e., with the Sketch-mapping task in complex route and eventually with the Wayfinding task). This assumption could also explain the heterogeneous findings with regard to active/passive learning manipulation. Indeed, when no active effect is found, it may be that the route inside the VE and/or the task used are too simple (the subjects do not need any exocentric spatial representation to perform the task).
More investigations are required to confirm these results and to investigate further the relationship between exploration mode, route complexity, and the subject's strategy. This is particularly relevant in the quest to determine how, why and for which type of patient virtual reality can prove useful in the assessment and rehabilitation of spatial capacity. In the future, such studies should lead to VE tools that provide appropriate cognitive aid for brain-injured patients. In this vein, our project is to use this virtual environment as a diagnostic and rehabilitation tool for Parkinson, Alzheimer and brain-injured patients.
[AHC97] The perception of spatial layout in real and virtual worlds, Ergonomics (1996), no. 1, 69—77, issn 0014-0139.
[Ber99] Parietal and hippocampal contribution to topokinetic and topographic memory, The hippocampal and parietal foundations of spatial cognition, N. Burgess and K.J. Jeffery and J. O'Keefe (Eds.), Oxford: University Press, 1999, pp. 381—403, isbn 0-19-852452-8.
[CB99] View dependence in scene recognition after active learning, Memory and Cognition, (1999), no. 6, 996—1007, issn 0090-502X.
[CGMV02] Route and survey descriptions of paths: The effect of experience of a large-scale environment, Bulletin of People-Environment Studies, Special Issue on Spatial Cognition, (2002), 15—17.
[EZM94] Memory of self-performed tasks: Self performing during recognition, Memory & Cognition, (1994), no. 1, 34—39, issn 0090-502X.
[FAP03] Transfer of route learning from virtual to real environments, Jounal of Experimental Psychology: Applied, (2003), no. 4, 219—227, issn 1076-898X.
[FMP01] Le traité de la réalité virtuelle, Nantes : Les Presses de l'Ecole des Mines, 2001, isbn 978-2-911762-62-8.
[FSP00] Spatial information transfer from virtual to real versions of the Kiel locomotor maze, Behvaiour Brain Research, (2000), no. 1-2, 53—61, issn 0166-4328.
[Gol99] Wayfinding behavior: Cognitive mapping and other spatial processes, Baltimore: John Hopkins University Press, 1999, isbn 9780801859939.
[GVKB01] Active, passive and snapshot exploration in a virtual environment: Influence on scene memory, reorientation and path memory, Cognitive Brain Research, (2001), no. 3, 409—420, issn 0926-6410.
[GZ81] Guilford-Zimmerman Aptitude Survey: Manual of instructions and interpretations, Minneapolis: Consulting psychologists press, 1981.
[Kit94] Cognitive maps: What are they and why study them? Journal of Environmental Psychology, (1994), no. 1, 1—19, issn 0272-4944.
[Kli06] Apports de la réalité virtuelle à la prise en charge de troubles cognitifs et comportementaux, Ecole Nationale Supérieure des télécommunications, 2006.
[Lia08] Evaluation of a Mobile MR Geovisualisation Interface, Proc. of the 29th annual conference of the European Association for Computer Graphics, Eurographics, 2008, pp. 231—234, 14-18 April Crete, Greece.
[MBF77] Levels of processing versus transfer appropriate processing Journal of Verbal Learning and Verbal Behavior, (1977), no. 5, 519—533, issn 0749-596X.
[PC01] Se déplacer et naviguer dans l'espace, Philippe Fuchs and Guillaume Moreau and Jean-Paul Papin (Eds.), Le traité de la réalité virtuelle, Nantes : Les Presses de l'Ecole des Mines, 2001, pp. 189—208, isbn 978-2-911762-62-8.
[PDH89] Orientation specificity in spatial memory: what makes a path different from a map of the path?, Journal of Psychology Learning Memory Cognition, (1989), no. 5, 887—897, issn 0278-7393.
[PL81] From frames of reference to spatial representations, L.S. Liben and A.H. Patterson and N. Newcombe (Eds.), Spatial representation and behavior across the life span, New York: Academic Press, 1981, pp. 39—61, isbn 9780124479807.
[PVG95] Acquisition of spatial knowledge through visual exploration of simulated environment, Ecological Psychology, (1995), no. 1, 1—20, issn 1532-6969.
[PW04] Active versus passive learning and testing in a complex outside built environment, Cognitive Processing, (2004), no. 4, 218—227, issn 1612-4782.
[RBR05] Virtual Reality in Brain Damage Rehabilitation: Review, CyberPsychology & Behavior - Special issue: Use of Virtual Environments in Training and Rehabilitation: International Perspectives, (2005), no. 3, 241—262, issn 1094-9313.
[RMH99] Spatial knowledge acquisition from maps and from navigation in real and virtual environments, Memory and Cognition, (1999), no. 4, 741—750, issn 0090-502X.
[Scr00] Impact de deux facteurs d'influence sur l'acquisition des connaissances spatiale dans une monde 3D, Université de Genève, 2000.
[SW75] The development of spatial representations of large-scale environments, Advances in child development and behavior, (1975), 9—55, issn 0065-2407.
[TG83] Spatial learning and reasoning skill, H. L. Pick and L. P. Acredolo (Eds.), Spatial orientation: Theory, research, and application, New York: Plenum Press, 1983, pp. 195—217, issn 0306412551.
[Tol48] Cognitive maps in rats and men, Psychological Review, (1948), no. 4, 189—208, issn 0033-295X.
[Vid02] Influence des cadres de référence sur la mémoire spatiale de trajets en trois dimensions, Collège de France, 2002.
[VK78] Mental rotations, a group test of three dimensional spatial visualization, Perceptual and Motor Skills, (1978), no. 2, 599—604, issn 0031-5125.
[WBKP96] Virtual spaces and real world places: transfer of route knowledge, Human-Computer Studies, (1996), no. 4, 413—428, issn 0171-5819.
[WFGS79] The effect of landmarks on route-learning in a computer-simulated environment, Journal of Environmental Psychology, (1997), no. 4, 305—313, issn 0272-4944.
[WHK98] The transfer of spatial knowledge in virtual environment training, Presence: Teleoperators and Virtual Environments, (1998), no. 2, 129—143, issn 1054-7460.
[WP02]
The influence of interactivity and attention on spatial learning in a desk-top virtual environment,
Current Psychology of Cognition,
(2002),
no. 6,
601—633,
issn 0249-9185.
Fulltext ¶
-
 Volltext als PDF
(
Size
674.2 kB
)
Volltext als PDF
(
Size
674.2 kB
)
License ¶
Any party may pass on this Work by electronic means and make it available for download under the terms and conditions of the Digital Peer Publishing License. The text of the license may be accessed and retrieved at http://www.dipp.nrw.de/lizenzen/dppl/dppl/DPPL_v2_en_06-2004.html.
Recommended citation ¶
Grégory Wallet, Hélène Sauzéon, Jérôme Rodrigues, and Bernard N’Kaoua, Transfer of spatial knowledge from a virtual environment to reality: Impact of route complexity and subject’s strategy on the exploration mode. JVRB - Journal of Virtual Reality and Broadcasting, 6(2009), no. 4. (urn:nbn:de:0009-6-17577)
Please provide the exact URL and date of your last visit when citing this article.
