Document Actions
GI VR/AR 2007
Evaluation of Binocular Eye Trackers and Algorithms for 3D Gaze Interaction in Virtual Reality Environments
-
Thies Pfeiffer
 Bielefeld University
Bielefeld University
- Marc E. Latoschik Bielefeld University
- Ipke Wachsmuth Bielefeld University
Abstract
- published: 2008-12-10
Keywords
- DOI: 10.20385/1860-2037/5.2008.16
- URN: urn:nbn:de:0009-6-16605
-
swd:
- 4125909-9
- 4399931-1
- 4301487-2
Evaluation of Binocular Eye Trackers and Algorithms
for 3D Gaze
Interaction in Virtual Reality Environments
urn:nbn:de:0009-6-16605
Abstract
Tracking user's visual attention is a fundamental aspect in novel human-computer interaction paradigms found in Virtual Reality. For example, multimodal interfaces or dialogue-based communications with virtual and real agents greatly benefit from the analysis of the user's visual attention as a vital source for deictic references or turn-taking signals. Current approaches to determine visual attention rely primarily on monocular eye trackers. Hence they are restricted to the interpretation of two-dimensional fixations relative to a defined area of projection.
The study presented in this article compares precision, accuracy and application performance of two binocular eye tracking devices. Two algorithms are compared which derive depth information as required for visual attention-based 3D interfaces. This information is further applied to an improved VR selection task in which a binocular eye tracker and an adaptive neural network algorithm is used during the disambiguation of partly occluded objects.
Keywords: Human-Computer Interaction, Eye Tracking, Virtual Reality, Object Selection
Subjects: Human-Computer Interaction, Virtual Reality, Eye Tracking Movement
Knowledge about the visual attention of users is a highly attractive benefit for information interfaces. The human eye is a powerful device for both perceiving and conveying information. It is faster than speech or gestures and it is closely coupled to cognition. Eye trackers offer a technical solution for acquiring the direction of gaze, from which the focus of attention can be derived. This has made eye tracking a powerful tool for basic research. For instance, in psycholinguistics the visual world paradigm [ TSKES95 ] has gained much attention. This paradigm is used to investigate the interaction between visual context and speech processing by tracking the users' gaze on a scene while producing or interpreting spoken language. Eye tracking has also become part of the standard toolkit of applied research, e.g., for interface evaluation. In both areas, eye trackers are primarily used as recording devices combined with a subsequent offline analysis.
The most prominent examples of online applications are gaze typing systems, which provide alternative means for text input for the physically challenged, e.g., the Eye-Switch system [ KFW79 ]. Supported by a boost in desktop processing power, customer video-based eye tracking units started to provide near real-time access to gaze direction in the late 1980s. Since then eye trackers have evolved to a feasible input device.
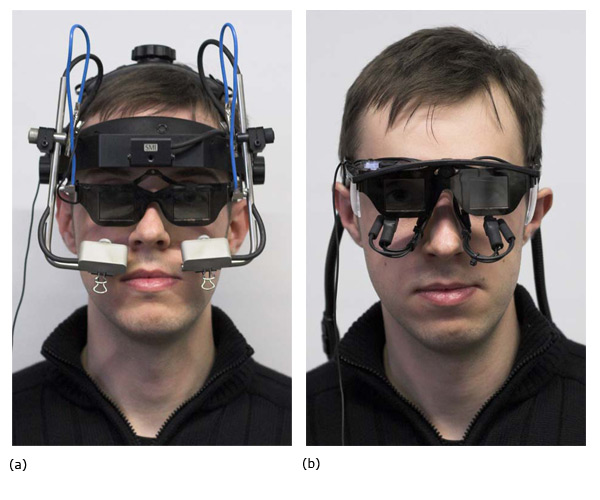
Today, portable head-mounted eye trackers are available (see Figure 1) and the user is no longer required to remain stable, i.e., sitting on a chair or even using a chin rest. Eye tracking therefore has also become an attractive input method for Augmented and Virtual Reality (VR).
Figure 1. (a) (b) The head-mounted eye trackers used in the study: (a) SMI EyeLink I and (b) Arrington Research ViewPoint PC-60 BS007. The shutter-glasses have been attached to the head-mount and the cameras are recording the eyes from below.
Relevant features of eye movements are fixations, i.e., short moments when the eyes are resting on a specific area, and the movements in between such resting points, the saccades. The eye tracking hardware is capable of capturing features necessary for reconstructing the line of sight from images of the eyes. However, the common approach provided by current state-of-the-art eye movement analysis software is to intersect this line of sight with a two dimensional plane, either a computer screen or a video image acquired by a so-called scene camera, and provide 2D coordinates relative to the specified plane.
Thus it is not surprising that, to the authors' knowledge, information about the depth of fixations are only rarely used in today's research, even though there are many lines of research that could greatly benefit from this knowledge, e.g., for the interpretation of spatial propositions ("in front of" vs. "behind" [ GHW93 ]). And even more, it has to be questioned whether findings obtained using 2D or 2 1/2D stimuli can be automatically generalized to 3D environments (see [ FPR06 ] for an example). A reliable algorithm for determining the depth of a fixation could therefore open new grounds for basic research.
Robust mobile 3D gaze tracking systems could also increase the capabilities of physically challenged users. Internal representations of users' surroundings could be augmented with semantic scene descriptions. By grounding the 3D gaze trajectories in a combined geometric and semantic representation of their surroundings, interaction models could utilize the additional context information to provide improved context-aware user centered interactions. Attentive computer vision systems could follow the guidance of the human gaze and selectively extract relevant information from the environment.
Knowledge about the area fixated by users in 3D space could also improve human-computer interaction in several ways. First of all, gaze plays an important role in computer mediated communication, e.g., when establishing eye contact to ensure mutual understanding or as turn-taking signals to control interaction in dialogues. Tracking gaze is therefore highly interesting for novel interfaces for teleconferencing such as Interactive Social Displays [ PL07 ] developed in the PASION project [ BMWD06 ]. The knowledge about the elements fixated by the users within the virtual world is also highly relevant for embodied virtual agents, such as Max [ KJLW03 ].
In direct interaction the 3D fixations could, e.g., be used for precise selection of entities in dense data visualizations. Using depth information, it is possible to detect fixations on objects behind transparent or sparse geometries, e.g., generated by shaders (grass, bushes), without requiring the line of sight to hit geometry. There are even applications on a technical level, e.g., in rendering technology, where the focused area can be rendered in greater detail (multiresolution) than the rest of the scene, and thus with equivalent rendering performance an increase in visual appearance is possible.
There already exist a number of successful approaches employing eye tracking technology in VR. Some of them will be described in more detail in the following section. However, all of the approaches known to the authors rely on a single eye and therefore can only utilize the direction of the gaze and not reliably estimate the depth of the fixated area. Thus, the approaches have a lower resolution than technically possible and are subject to ambiguities. This will be elaborated in more detail in section 2.1. In this article we are going to tackle the following questions:
Gaze plays an important role in the design of embodied conversational agents (ECAs) [ TCP97 ] and eye tracking technology provides a viable source of data on human gazing behavior. Vertegaal et al. [ VSvdVN01 ] derive implications for gaze behavior of ECAs in communicative situations from eye tracking studies on human conversations. Others, such as Lee et al. [ LBB02 ], create computational models for gaze pattern production in virtual agents based on data on natural eye movements. Examples of online interpretation of eye tracking data are the already mentioned gaze typing systems.
Knowledge about the user's visual attention can be used to facilitate human-to-human interaction in VR environments. Duchowski et al. [ DCC04 ] project the eye movements of a user onto a virtual avatar and show advantages of a visible line of sight for the communication of references to objects. More technical approaches employ information about the focused area to optimize rendering processes [ LHNW00 ].
Human-machine interaction within VR systems can also greatly benefit from information gained by eye tracking. Tanriverdi and Jacob [ TJ00 ] demonstrate a significantly faster object selection when it is based on gaze as compared to gestures. Their algorithm combines the picking algorithm provided by SGI Performer with a histogram-based approach, counting the relative frequencies of fixations per object and selecting the most frequently fixated object within a time window. They use the intersection of the line of sight with the 2D plane defined by the projection plane as basis for the picking ray.
Using a ray along the visual axis as the basis for a gaze-based interaction model is an approach also followed by Duchowski et al. [ DMC02 ] and Barabas et al. [ BGA04 ]. They anchor the ray in the position of the eye or the head and project it through a fixation on a 2D plane, which is defined by the projection surface.
Interpreting pointing as a ray or vector is quite common for pointing gestures [ Kit03 ] and we have conducted a study on the performance of human pointing [ KLP06 ] to evaluate models for the interpretation of pointing gestures. The studies show that taking gaze into account improves the accuracy of the interpretation of pointing gestures. In these models the direction of gaze is only approximated by the direction of the face and thus we expect even better performance when considering the actual direction of the gaze measured by an eye tracker.
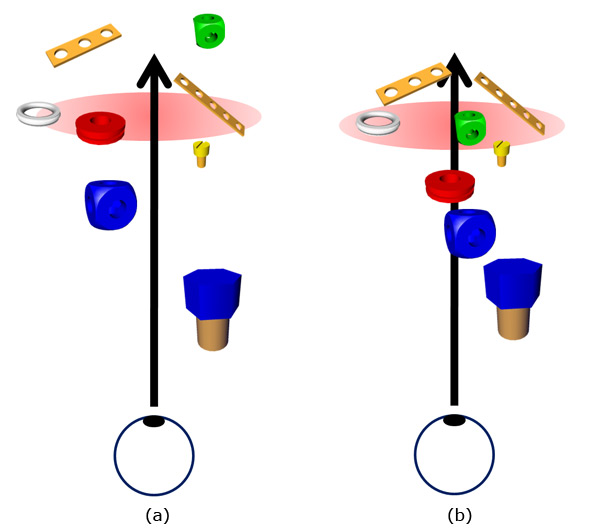
In ray-based approaches, determining the depth of a fixation has to deal with several problems (see Figure 2): it is (a) only possible if the ray of sight directly intersects a geometry; there is (b) an ambiguity whenever several geometries are intersecting the ray of sight and these approaches (c) do not respect the dominance of a specific eye when determining the fixation.
Figure 2. Selecting objects via ray-based approaches suffers from ambiguities. (a) If the ray does not hit any object the selection is underspecified. (b) If several objects are hit the selection is overspecified. Both cases demand appropriate selection heuristics.
Problems (a) and (b) are also relevant and known for pointing/picking and there exist several approaches to improve performance. Natural interaction technologies often employ heuristics, for instance, they take the distances of objects to the picking ray into account and thus they do not require a direct intersection with the object's geometries [ OBF03 ]. More technical approaches either use tools [ FHZ96 ] or visualizations as aiming aids.
Modelling human visual perception as a ray can only be a simplification. In reality, the eyes cannot see equally well all along the visual axis. In the following section we provide a brief review of depth perception, focusing on features appropriate for sensory acquisition.
Although the retina of the human eye only samples a 2D projection of the surroundings, humans are capable of reconstructing a three-dimensional impression of their environment. In the literature (e.g. [ Gol02 ]) several criteria for depth perception can be found:
monocular depth criteria such as occlusion, relative size/height in the field of view, common size of objects, atmospherical and linear perspective, the gradient of texture, or motion parallax convey spatial information with a single eye only;
binocular depth criteria are disparity (differences in the retinal picture caused by the disparity of the eyes), vergence (see Figure 3), or accommodation
Binocular depth perception, stereopsis, provides means to differentiate between the depth of objects up to a distance of about 135 meters. If the depth of a fixation is to be determined, only such criteria can be used which require measurable effort from the perceptual system. As most criteria do not involve a sensory-motor component, from the listed criteria only vergence and accommodation remain for consideration. Both vary depending on the distance of the fixated object.
The human eyes are optimized to see very accurate only within a small area of the retina, the fovea centralis. The area covered by the fovea centralis is less than 1°. This implies that if an object is to be inspected, the eyes have to be oriented in such a way that the projection of the object onto the retina falls (partly) onto the fovea centralis. If this happens, the images of both eyes can be fused. The projection of the object through the center of the eye onto the retina is the visual line. For eye movements two categories are distinguished: when the eyes follow an object horizontally or vertically, moving in the same direction, they are called version movements and when the eyes move locally in opposite directions, they are called vergence movements. Those vergence movements can be found when fixating objects in different depths. As they involve the movements of both eyes, they can only be measured by binocular eye trackers. The relevant movement for the stereoscopic depth perception is the horizontal component of the movement [ Whe38 ]. Measuring vergence angles one may differentiate fixation depths up to a distance of 1.5 m to 3 m depending on the user's visual faculty.
Accommodation can be measured with research prototypes of vision-based eye trackers [ SMIB07 ], but not with off-the-shelf technology, so far. A healthy eye of a young adult has an operational range between focal lengths from 1.68 cm to 1.80 cm. Thus differences in accommodation can be measured for distances between approximately 0.25 m and 100 m.
The working range of vergence movements nicely covers typical interaction spaces within immersive set-ups. Whether a state-of-the-art binocular eye tracker does provide sufficient means to measure vergence angles at resolutions reasonable for human-machine interaction will be one of the questions tackled by the user study presented in section 3. Tracking accommodation would significantly increase the operational range of 3D gaze determination. However, to our knowledge the available head-mounted devices do not currently offer this functionality.
In our study presented in section 3 we want to test two different approaches to estimate the depth of a fixation. The first is a straight forward approach using linear algebra triangulation: the depth is determined by the intersection of the visual axes of the two eyes converging on the target. The second approach has been proposed by Essig and colleagues [ EPR06 ]: a parameterized self-organizing map adapts to the viewing behavior of the user and the visual context, learning the mapping from the 2D coordinates of the fixations of both eyes on a display to the fixated point in depth. This approach has previously only been tested with an anaglyphic stereo projection and dot-like targets. In the study presented in this article shutter-glasses are used in a desktop VR scenario. Rather than points or fixation crosses, small geometric models of real objects are used as targets. This is motivated out of several reasons. First of all, points are more difficult to fuse when perceiving a stereo image. Unwanted ghosting effects increase with high-contrast between points and background. Also, objects constitute a more realistic scenario, which is closer to real applications. And finally, using geometric models of existing real objects, we were able to replicate the presented study on real objects [ PDLW07 ].
Figure 3. Calculating the depth of a fixation using linear algebra. Although the visual axes of the eyes may
intersect in the focal point  when projected to a plane (a, top view), in three dimensions they may still not
intersect (b, side view).
when projected to a plane (a, top view), in three dimensions they may still not
intersect (b, side view).
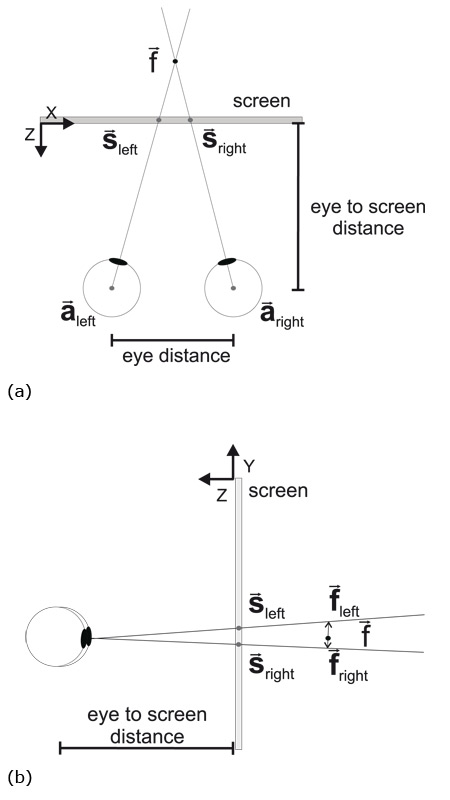
In theory, the point being fixated with both eyes
can be determined by intersecting the visual axes of
the eyes (see Figure 3). Given the positions of the
two eyes
 and
and
 , as well as the fixations of
both eyes
, as well as the fixations of
both eyes
 and
and
 , as provided by the eye
tracker, on the projection surface, we can derive the
following line equations
, as provided by the eye
tracker, on the projection surface, we can derive the
following line equations
 (1) and
(1) and
 (2) for
the visual axes and specify a minimization problem
(3):
(2) for
the visual axes and specify a minimization problem
(3):
 (1)
(1)
 (2)
(2)
 (3)
(3)
Solving the minimization problem will provide
two points
 and
and
 on both visual axes, see
Figure 3(b), which are the points with the shortest
distance to the other axis. The point of fixation
then is
the midpoint of the line segment between
and
.
on both visual axes, see
Figure 3(b), which are the points with the shortest
distance to the other axis. The point of fixation
then is
the midpoint of the line segment between
and
.
This approach, though, has some disadvantages. First, the physical parameters such as the height, the disparity and the geometry of the eyes vary between users and would have to be measured for each person. Also, one of the eyes typically dominates the other, that is, this eye's fixations are likely to be more precise and accurate than those of the other. More generally, users may have different behavioral patterns in their vergence movements. Together with device specific systematic errors and noise in the angles measured by the eye trackers this will lead to differences between the real and the approximated visual axis. These parameters are not taken into account by the geometric algorithm. An accurate calibration procedure could help to estimate some of the parameters. But to get reasonable data, calibration may have to be repeated several times, which would make it a tedious procedure. As the maintenance of an accurate tracking requires a recalibration every time the eye tracker slips, this would soon be tiring.
Essig et al. [ EPR06 ] proposed an adaptive algorithm to estimate the depth of a fixation, which may be more suitable under these conditions. Their approach is summarized below.
The idea is to replace the fixed mapping provided by the linear algebra approach with a flexible mapping based on machine learning. This mapping should translate the 2D fixation coordinates provided by the eye tracker for both eyes to a 3D coordinate describing the singular binocular fixation in depth. This mapping will have to be learned and thus will require user interaction. The 2D calibration procedure required for the 2D eye tracking software will therefore be followed by a 3D calibration procedure using a 3D grid of points. A usability-requirement is that the learning procedure is as smooth and fast as possible, as relearning will be necessary every time the eye tracking device slips.
Essig et al. [
EPR06
] proposed to use a Parameterized
Self-Organizing Map (PSOM), a smooth high-dimensional
feature-map [
Rit93
] for approximating the 3D fixation.
The PSOM is derived from the SOM [
Koh90
] but
needs less training to learn a non-linear mapping. It
consists of neurons a ∈ A with a reference vector
 defining a projection into the input space X ⊆
defining a projection into the input space X ⊆
 d
. The
reference vector is defined as
= (xl, yl, xr, yr, xdiv)
with (xl, yl) and (xr, yr) being the fixations on the
projection plane measured by the eye tracker. As the
horizontal distance of the fixations has a significant
contribution to the determination of the depth, it is
added as an additional parameter xdiv = xr - xl
to
.
d
. The
reference vector is defined as
= (xl, yl, xr, yr, xdiv)
with (xl, yl) and (xr, yr) being the fixations on the
projection plane measured by the eye tracker. As the
horizontal distance of the fixations has a significant
contribution to the determination of the depth, it is
added as an additional parameter xdiv = xr - xl
to
.
To train the PSOM, all 27 points of a three-dimensional
3 x 3 x 3 calibration grid are presented subsequently and
the corresponding
are measured. From this one can
derive a function
(s) mapping the coordinates of the 3D
grid onto the reference vectors.
Thus
(s) is constructed in such a way that the
coordinates of the 3D grid can be mapped to the 2D
positions of the fixations. To find the fixation one has then
to find the solution of the inverse function numerically
using gradient descent, which is done in the network's
recurrent connections.
In the user study we used exactly the PSOM as
specified by Essig and colleagues [
EPR06
].
We conducted a user study to test accuracy, precision and application performance of the two algorithms in combination with two eye trackers available to our group. Our goal was to find a combination of software and hardware suitable for 3D gaze-based interaction in Virtual Environments.
Figure 4. The set-up of the experiment used shutter-glasses and a cathode-ray display. The head of the user was stabilized using a chin rest.

Based on the questions presented in the introduction, the following hypotheses guided the study:
A: PSOM is more precise and accurate than the geometric approach
Of the two algorithms presented, the PSOM should have noticeable advantages. This approach was therefore expected to provide higher precision and accuracy compared to the geometric approach, according to the reasons pointed out in Section 2.1.
B: The high-end device is more precise and accurate than the low-cost device in binocular use
Two different head-mounted devices were tested (see Figure 1): the EyeLink I from SMI as a representative of the high-end devices (> € 30,000) and the system PC60 from Arrington Research as a representative for the low-cost sector (< € 12,000). The technical details presented in Table 1 show that the device from SMI has noticeable advantages regarding speed and accuracy. In addition, it is equipped with a unit for compensating small head movements.
Table 1. Technical details of the eye tracking systems.
|
|
Arrington PC60 |
SMI EyeLink I |
|
temporal resolution (Hz) |
30 / 60 |
250 |
|
optical resolution (pixel) |
640 x 480 / 320 x 240 |
- |
|
deviation from real eye pos |
0.25° - 1.0° visual angle |
< 1.0° visual angle |
|
accuracy |
0.15° visual angle |
0.01° visual angle |
|
compensation of head shifts |
not possible |
∓30° horizontal, ∓20° vertical |
C: Knowing the depth of a fixation will increase success rate when selecting objects
Exploiting knowledge about the depth of a fixation should improve the disambiguation of difficult cases where objects are partially occluded, but have significant differences in depth (see Figure 2). Therefore this approach should have a higher success rate for these object selections than traditional 2D-based approaches.
Figure 5. Position of the objects in the model (left). The objects numbered 17 to 20 define the critical area where a selection based on 2D method leads to ambiguities (right).
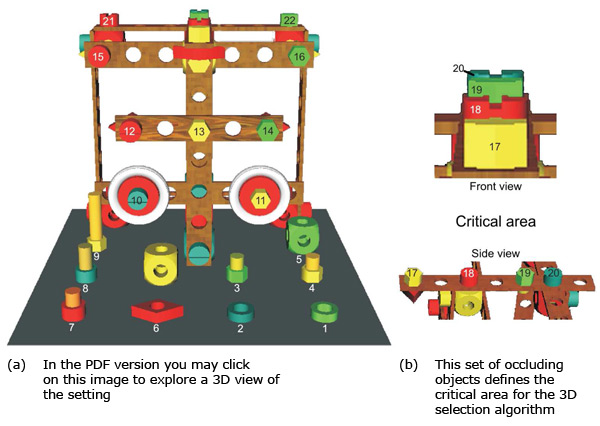
Table 2. Object dimensions (in mm) of the target set of objects used for the fixation and selection task. The numbers refer to the objects as specified in Figure 5.
|
Object Number |
x |
y |
z |
|
1, 2 |
23 |
8 |
23 |
|
3, 4, 17, 19, 22 |
20 |
24 |
17 |
|
5 |
30 |
30 |
30 |
|
6 |
30 |
10 |
30 |
|
7, 18, 20, 21 |
20 |
24 |
20 |
|
8 |
20 |
34 |
20 |
|
9 |
20 |
60 |
17 |
|
10 |
20 |
20 |
34 |
|
11 |
20 |
17 |
24 |
|
12, 15 |
20 |
20 |
24 |
|
13, 14, 16 |
20 |
17 |
24 |
Participants looked at a 3D scene showing a structure built out of toy building blocks (see Figure 4 and Figure 5). The dimensions of the relevant target objects used in the study are provided in Table 2. The structure was built to fit exactly inside a cube of 30 cm and was positioned right behind the projection surface. This allowed us to replicate the same setting with real objects in a subsequent study. A 21" Samsung SyncMaster 1100 cathode-ray monitor was used together with a NVidia Quadro4 980 XGL and Elsa Retaliator consumer class shutter-glasses for the stereoscopic projection. Both eye tracking systems are prepared to be used in monitor-based settings. The implementation of the experiment was based on the 3D extension of the VDesigner software described in [ FPR06 ].
Figure 6. Sketch of the set-up: the virtual space fits exactly inside a cube of 30 cm located behind the plane of projection.
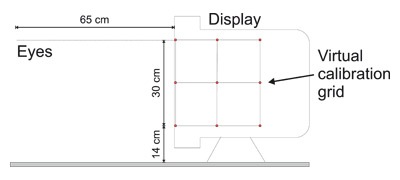
The study had four conditions, resulting from an intra-personal covariation of two tested eye trackers and two algorithms. To stabilize external factors, the distance from the head to the projection plane was fixated to 65 cm using a chin rest. The height of the chin rest was adjusted so that the eyes of the user were positioned on level with the upper edge of the virtual calibration grid (see Figure 6).
The two eye trackers, the SMI EyeLink I and the Arrington PC60, are both head-mounted. In addition to the eye tracker the participants also had to wear the shutter-glasses. The combination of a projection technology requiring special glasses and vision-based eye tracking systems is delicate, as the cameras of the eye tracking systems cannot see clearly through the glasses. In our case we adjusted them to a position below the glasses with a free, but very steep, perspective onto the eye. For the SMI EyeLink I we had to construct a special mounting for the glasses, as the original one interfered with the bulky head-mounted eye tracking system. This also allowed to increase the gap between the eyes and the glasses so that orienting the cameras of the eye tracking systems was easier.
Following the standard 2D calibration procedure provided by the accompanying eye tracking software a 3D calibration procedure was run. For this participants were presented the points of the calibration grid; for a side view see Figure 6. To fixate the leftmost calibration point on the front side of the cube the right eye of the user had to rotate 49.27° to the left, whereas the rightmost point was 32.29° to the right. To fixate all points on the back side of the cube, the right eye had to rotate 36.16° to the left and 22.25° to the right. To fixate a point in the upper center of the front side the eyes had to converge 8.99° and for a corresponding point on the back side 6.16°.
A pilot study had shown that each person needed an individual timespan to acquire 3D perception with the projection technology used, so the calibration was self-paced. During the calibration procedure, all points of the grid were presented dimly lit and only the point to be fixated was highlighted. The points were traversed on a per plane basis, as recommended by Essig and colleagues [ EPR06 ]. However, they only displayed the points of one plane at a time while we showed all points simultaneously, but dimly lit.
A life-sized VR model of toy building blocks was shown during the experiment (see Figure 4). The experimenter verbally referenced objects within the model which should then be fixated by the participants. As soon as they fixated the object, the participants affirmed this by pressing a key. The 3D fixation points were calculated internally for each fixation using both algorithms and the results were logged. This was performed with each participant using the 22 objects depicted in Figure 5, once with the SMI EyeLink I and once with the Arrington Research PC60.
Table 3. Results comparing the different conditions. A significant difference of the means of the fixation depths shows up in favor of the PSOM-algorithm.
|
device |
algorithm |
normally distributed |
mean |
difference btw. algorithms |
nominal error |
standard deviation |
|
Arr. |
geom. |
no, p < 0.001 |
-195.77 mm |
sig. p < 0.001 |
sig. p < 0.001 |
526.69 mm |
|
|
PSOM |
yes, p = 0.943 |
-18.75 mm |
|
sig.p = 0.005 |
96.92 mm |
|
SMI |
geom. |
no, p = 0.038 |
-248.55 mm |
sig. p < 0.001 |
sig. p < 0.001 |
149.3 mm |
|
|
PSOM |
yes, p = 0.661 |
-70.57 mm |
|
sig. p < 0.001 |
60.06 mm |
In this study we tested 10 participants (4 females and 6 males). The mean age was 26.2 years, the youngest participant was 21 years and the oldest 41 years old. Four participants were nearsighted and one farsighted. All participants had normal or corrected sight (contact lenses) during the experiment. They rated the difficulty of the experiment with 2.2 on a scale from 1 (very easy) to 6 (extremely hard).
Four participants reported difficulties in fixating the virtual calibration crosses: they experienced problems getting the crosses to overlap for getting the 3D impression. However, a post-hoc analysis of calibration data and fixations revealed no significant differences compared to other participants.
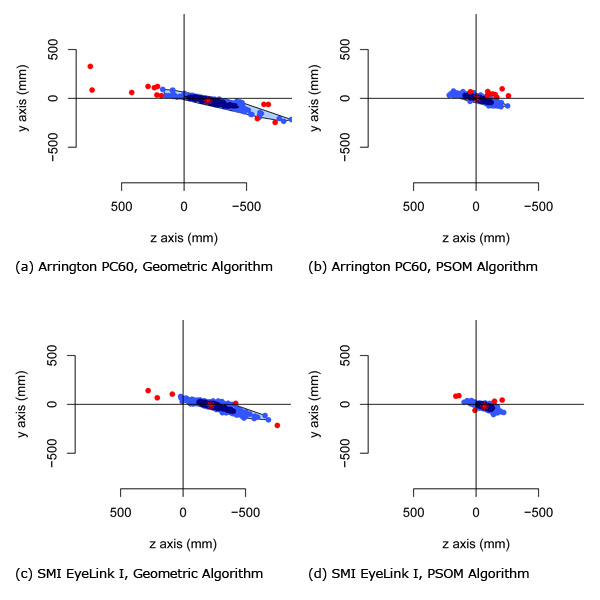
The relative deviations of the calculated fixations from the real object positions (defined by the center of the object geometries) over all participants are shown in bagplots for the axes y and z (depth) in Figure 7 .
Figure 7. Bagplots showing the relative errors of the different conditions for the y axis and the z axis. The perspective is equal to Figure 6, thus the user is looking towards negative z. The darker areas contain the best 50% fixations (those with the lowest deviations) and the brighter areas contain the best 75% fixations. The red dots mark outliers and the asterisks within the darker area marks the mean value. (a) Arrington PC60, Geometric Algorithm; (b) Arrington PC60, PSOM Algorithm; (c) SMI EyeLink I, Geometric Algorithm; (d) SMI EyeLink I, PSOM Algorithm
The Kolmogorov-Smirnov test [ Con71 ] showed that both datasets are not normally distributed. We therefore applied the Mann-Whitney-Wilcoxon test [ HW73 ] to examine whether the absolute means of both datasets are significantly different and if the means differ significantly from the nominal values. An alpha level of 0.05 is considered significant (see Table 3) in all tests.
In the test series for the two eye trackers the results for the z axis show that the means of the fixations approximated by the PSOM are significantly closer to the nominal value than those calculated by the geometric approach ( 7 from left to right). Still, all means differ significantly from the nominal value. The means of the results for the device from Arrington Research are closer to the nominal value than those from the SMI eye tracker ( 7 from top to bottom). Thus it can be said that the device from Arrington Research showed a higher accuracy in our study.
The SMI device, however, achieved a higher precision, which is expressed in the lower standard deviations when compared to the device from Arrington Research. The precision using the PSOM algorithm is higher than the precision of the geometric algorithm for both devices.
Besides the described quantitative accuracy study, qualitative implications for applications were tested on an object selection task. We tested whether a selection algorithm based on the 3D fixations manages to successfully identify more objects than an approach based on 2D fixations only. Backed by the previous results we only considered the PSOM approach using the Arrington Research PC60 for the 3D fixations.
The 2D selection algorithm determines the Euclidean distance between the 2D coordinates on the projection plane provided by the eye tracking software and the projected screen coordinates of the 22 objects (center of object). The object with the smallest distance to at least one of the fixations of both eyes was taken as the selected object. The selection was then checked against the prompted object.
The 3D selection algorithm worked similarly using a standard 3D distance metric. Of the 22 objects, 4 were positioned in such a way that their projections partially occluded each other and thus led to an ambiguous situation for the 2D selection test. This set of objects defined a critical area for the test.
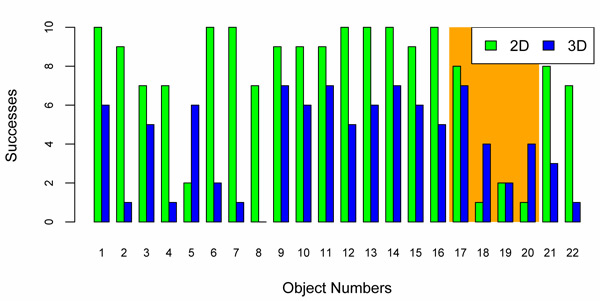
The 2D selection algorithm successfully identified 165 (75%) of the 220 possible object selections (22 per participant). The 3D selection algorithm identified only 92 (42%). In the critical area comprising the objects 17 to 20 (40 selections) the 3D algorithm manages to disambiguate 17 (42%) object selections compared to 12 (30%) identified by the 2D algorithm. Figure 8 shows the successful selections per object. The numbering of the objects is depicted in Figure 5.
The following conclusions for the three hypotheses (see 3.1) can be derived from the results of the study.
A: accepted. PSOM is more precise than the geometric approach
The fixations approximated by the PSOM are significantly more precise and accurate than the results of the geometric approach for the y and z coordinates for both eye trackers.
This result replicates the findings of Essig and colleagues [ EPR06 ]. They had already shown that the error increases with distance from the observer. Compared to their results we found greater deviations of the means and of the standard errors. This was expected, as in our setting we considered objects with a distance between 65 cm and 95 cm from the observer, whereas in their setting the objects were located in an area between 39 cm and 61 cm in front of the observer.
Further, we did not use dots or crosses (diameter: 1° of visual angle) as targets, but models of small real objects (diameter: 1° - 3° of visual angle), such as bolts and nuts. Thus the error, which is defined as the deviation of the fixation from the center of the object, had a higher standard deviation because the participant could fixate on a larger area than with dots.
B: (partly) rejected. The low-cost device has been more accurate in the study
Although the EyeLink I has a higher precision, the PC60 proved to be more accurate in our setting. One possible explanation is that the 2D calibration using the shutter-glasses is more difficult with the EyeLink I because the adjustment of the cameras of the EyeLink I system is more difficult. In the study the fixations could often only be rated poor by the provided software. Thus the base data was less precise. This predication therefore only holds for the projection technology and the shutter-glasses used. However, while the results may not be transferable to different set-ups, they are still relevant for many desktop-based VR set-ups that can be found in basic research.
C: (partly) rejected. Considering fixation depth does reduce success rate
Using the results of the algorithms to estimate the 3D fixation for object selection on the whole scene yields a lower success rate than with the original 2D selection (42% to 75%). Only in the criticial area (objects 17 to 20 in Figure 5), where the partial occlusion of objects leads to ambiguities with the 2D selection, the 3D selection method can demonstrate an improvement (42% to 30%). Comparing the coordinates estimated by the 3D approaches with the coordinates provided by the eye tracker shows that the estimated values are less precise. One explanation could be, that for the 2D object selection only the best fixation of both eyes, that is, the one nearest to the object, has been considered. This should in most cases be the fixation from the dominant eye. For the 3D object selection, information of both eyes needs to be integrated and thus the less precise eye adds some noise to the data. In addition, the 2D calibration provided by the eye tracking system is well evolved, done automatically and did not require stereopsis, whereas the 3D calibration is a research prototype, done self-paced and required a good stereopsis.
Figure 8. Histogram of the correct object selections over all 10 sessions (see Figure 5). The critical area of overlapping objects (numbers 17 to 20) is highlighted.
The results show that 3D fixations can be derived from vergence movements and the findings of Essig and colleagues [ EPR06 ] can be generalized to shutter-glass based projection technologies.
The adaptive PSOM approach based on five parameters (x/y coordinates of left and right 2D fixations and difference in x coordinate) outperforms the geometric approach. However, the performance shown in our study is not as good as in the study of Essig and colleagues [ EPR06 ]. We attribute this to larger fixation target sizes and the more difficult set-up: in the original setting, the fixation targets were distributed over four levels of depth, two behind the screen (-3.67 cm and -11 cm) and two in front of the screen (3.67 cm and 11 cm). The fixation targets in our setting were all presented behind the screen (-4.5 cm to -25.5 cm). Fixations closer to the user require greater vergence movements and thus measurement errors have a smaller effect.
External factors, e.g. the VR technology used for the study, may limit the performance. Insufficient channel separation (ghosting) of the applied stereoscopy method and a tracking from below the glasses complicates the procedure. More advanced technologies, such as passive projections based on polarized light, could thus further improve the performance. Also, the limited interaction space of the desktop-based VR platform led to a crouded scenary where the limits of the resolution of the eye tracker have been met. In our study, 22 objects have been used as fixation targets. Most studies in basic research, that are bound to eye tracking on a computer screen, restrict themselves to four to eight objects.
The presented study is part of a series of studies. In a subsequent study presented at ECEM 2007 [ PDLW07 ], we examined an analogous scenario with real objects. The study confirmed the advantage of the PSOM in estimating the depth of the fixations. Moreover, accuracy and precision of the fixations are even better on real objects, which is another indicator that the stereo projection technology used in the study (shutter-glasses) may have deprived some performance.
A following study showed an increased accuracy and precision of the Arrington Research PC60 within a 3-sided immersive VR display (two adjacent walls, one floor) using a projection technology based on polarized light [ Pfe08 ]. This setting also provided new technical challenges as the users could move freely in the VR setup of a size of 8m³.
The strong definition of hypotheses C, which demanded for a general increase in performance, could not be held. However, the usefullness of 3D fixations for interaction in Virtual Reality has been successfully demonstrated for the common object selection task in the critical area. The 3D fixations could help to disambiguate between overlapping objects, which led to a 40% increase in success rate. A hyprid approach that uses 2D fixations per default and disambiguates fixations on overlapping objects with 3D fixations could be a viable solution.
The authors wish to thank Matthias Donner, who conducted the user study as part of his diploma thesis. This work has been partly funded by the German Research Foundation within the Collaborative Research Center 673 Alignment in Communication and by the EU within the project PASION (Psychologically Augmented Social Interaction Over Networks).
[BGA04] Tracking the line of primary gaze in a walking simulator: Modeling and calibration, Behavior Research Methods, Instruments and Computers, (2004), no. 4, 757—770, issn 0743-3808.
[BMWD06] The PASION Project: Psychologically Augmented Social Interaction Over Networks, PsychNology, (2006), no. 1, 103—116, issn 1720-7525.
[Con71] Practical nonparametric statistics, 1971, John Wiley & Sons, New York, pp. 295—301, isbn 0-47116-068-7.
[DCC04] Visual Deictic Reference in a Collaborative Virtual Environment, Eye Tracking Research & Applications Symposium 2004, March 2004, San Antonio, TX, pp. 35—40, ACM Press, isbn 1-58113-825-3.
[DMC02] 3D Eye Movement Analysis, Behavior Research Methods, Instruments and Computers, (2002), no. 4, 573—591, issn 0743-3808.
[EPR06] A neural network for 3D gaze recording with binocular eye trackers, The International Journal of Parallel, Emergent and Distributed Systems, (2006), no. 2, 79—95, issn 1744-5779.
[FHZ96] Aperture based selection for immersive virtual environment, Proceedings of the 1996 ACM Symposium on User Interface Software and Tech. (UIST'96), 1996, pp. 95—96, isbn 0-89791-798-7.
[FPR06] Psycholinguistic experiments on spatial relations using stereoscopic presentation, Situated Communication, 2006, Gert Rickheit and Ipke Wachsmuth (Eds.), pp. 127—153, Mouton de Gruyter, Berlin, isbn 3-11018-897-X.
[GHW93] Wenn "vor" gleich "hinter" ist - zur multiplen Determination des Verstehens von Richtungspräpositionen, Kognitionswissenschaft, (1993), pp. 171—183, issn 0938-7986.
[Gol02] Wahrnehmungspsychologie, Spektrum Akademischer Verlag, 2002, isbn 3-82741-083-5.
[HW73] Nonparametric statistical inference, John Wiley & Sons, New York, 1973, isbn 0-47119-045-4.
[KFW79] Eye-Switch Controlled Communication Aids, Proceedings of the 12th International Conference on Medical & Biological Engineering, August 1979, pp. 19—20.
[Kit03] Pointing: A Foundational Building Block of Human Communication, Pointing: Where Language, Culture, and Cognition Meet, Lawrence Erlbaum Associates, Inc., Mahwah, New Jersey, 2003, 1 pp. 1—8 isbn 0-80584-014-1.
[KJLW03] Max - A Multimodal Assistant in Virtual Reality Construction, KI-Künstliche Intelligenz, (2003), 11—17, issn 0933-1875.
[KLP06] Deixis: How to Determine Demonstrated Objects Using a Pointing Cone, Gesture Workshop 2005, 2006, Sylvie Gibet, Nicolas Courty, and Jean-François Kamp (Eds.), LNAI 3881, pp. 300—311, Springer-Verlag GmbH, Berlin Heidelberg, issn 0302-9743.
[Koh90] The self-organizing map, Proceedings of IEEE, (1990), no. 9, 1464—1480, issn 0018-9219.
[LBB02] Eyes alive, SIGGRAPH '02: Proceedings of the 29th annual conference on Computer graphics and interactive techniques, 2002, pp. 637—644, New York, NY, USA, ACM Press, isbn 1-58113-521-1.
[LHNW00] Perceptually Driven Simplification Using Gaze-Directed Rendering, University of Virginia, 2000.
[OBF03] SenseShapes: Using Statistical Geometry for Object Selection in a Multimodal Augmented Reality System, Proceedings of The Second IEEE and ACM International Symposium on Mixed and Augmented Reality (ISMAR 2003), Tokyo, Japan, October 2003, pp. 300—301, isbn 0-7695-2006-5.
[PDLW07] 3D fixations in real and virtual scenarios, Journal of Eye Movement Research, Special issue: Abstracts of the ECEM 2007, 2007, 13, issn 1995-8692.
[Pfe08] Towards Gaze Interaction in Immersive Virtual Reality: Evaluation of a Monocular Eye Tracking Set-Up, Virtuelle und Erweiterte Realität - Fünfter Workshop der GI-Fachgruppe VR/AR, 2008, Marco Schumann and Torsten Kuhlen (Eds.), pp. 81—92, Aachen, Shaker Verlag GmbH, isbn 978-3-8322-7572-3.
[PL07] Interactive Social Displays, IPT-EGVE 2007, Virtual Environments 2007, Short Papers and Posters, 2007, Bernd Fröhlich, Roland Blach, and Robert van Liere(Eds.), pp. 41—42, Eurographics Association.
[Rit93] Parametrized self-organizing maps, ICANN93 Proceedings, 1993, pp. 568—577.
[SMIB07] Application of video-based technology for the simultaneous measurement of accommodation and vergence, Vision research(Oxford), (2007), no. 2, 260—268, issn 0042-6989.
[TCP97] Modeling Gaze Behavior as a Function of Discourse Structure, Paper presented at the First International Workshop on Human-Computer Conversation, 1997.
[TJ00] Interacting with eye movements in virtual environments, Conference on Human Factors in Computing Systems, CHI 2000, 2000, pp. 265—272 New York, ACM Press, isbn 1-58113-216-6.
[TSKES95] Integration of visual and linguistic information in spoken language comprehension, Science, (1995), no. 5217, 1632—1634, issn 0036-8075
[VSvdVN01] Eye Gaze Patterns in Conversations: There is More to Conversational Agents Than Meets the Eyes, Proceedings ACM SIGCHI Conference CHI 2001: Anyone. Anywhere, Seattle, USA, 2001, Julie Jacko, Andrew Sears, Michel Beaudouin-Lafon, and Robert J. K. Jacob (Eds.), pp. 301—308, ACM Press, New York, isbn 1-58113-327-8.
[Whe38] Contributions to the Physiology of Vision. Part the First. On some remarkable, and hitherto unobserved, Phenomena of Binocular Vision, Philosophical Transactions of the Royal Society of London, (1838), 371—394, issn 0261-0523.
Fulltext ¶
-
 Volltext als PDF
(
Size
1.2 MB
)
Volltext als PDF
(
Size
1.2 MB
)
License ¶
Any party may pass on this Work by electronic means and make it available for download under the terms and conditions of the Digital Peer Publishing License. The text of the license may be accessed and retrieved at http://www.dipp.nrw.de/lizenzen/dppl/dppl/DPPL_v2_en_06-2004.html.
Recommended citation ¶
Thies Pfeiffer, Marc E. Latoschik, and Ipke Wachsmuth, Evaluation of Binocular Eye Trackers and Algorithms for 3D Gaze Interaction in Virtual Reality Environments. JVRB - Journal of Virtual Reality and Broadcasting, 5(2008), no. 16. (urn:nbn:de:0009-6-16605)
Please provide the exact URL and date of your last visit when citing this article.
